【分析】
这是一道结合生活场景的杠杆综合题,解题思路如下:
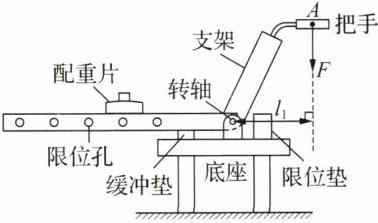
1. 第(1)问画拉力的力臂:首先确定支点为图中的转轴位置,再沿拉力F的方向延长作用线,最后从支点向拉力的作用线作垂线段,该垂线段就是拉力的力臂。
2. 第(2)问求新的拉力:先利用初始状态的杠杆平衡条件,算出配重片对应的初始阻力臂,配重片向左移动一个限位孔后,阻力臂会增加15cm,再次代入杠杆平衡公式就能算出新的拉力。
3. 第(3)问分析拉力的动态变化:向下拉动支架转动的过程中,拉力和配重重力始终都是竖直方向,分别判断动力臂、阻力臂的变化趋势,结合杠杆平衡条件就能推导拉力的变化情况。
【解析】
(1) 首先定位支点为转轴的中心位置,将拉力F的作用线向下适当延长,从支点向F的作用线作垂直的线段,标注出力臂符号即可。
(2) 先计算配重片的重力:$G=mg=10\ \mathrm{kg} × 10\ \mathrm{N/kg}=100\ \mathrm{N}$
根据杠杆平衡条件$F_1l_1=F_2l_2$,代入初始状态数据:
$150\ \mathrm{N} × 30\ \mathrm{cm} = 100\ \mathrm{N} × l_2$,解得初始阻力臂$l_2=45\ \mathrm{cm}$
配重片左移一个限位孔后,新的阻力臂$l_2'=45\ \mathrm{cm}+15\ \mathrm{cm}=60\ \mathrm{cm}$,动力臂仍为30cm,再次代入杠杆平衡条件:
$F' × 30\ \mathrm{cm}=100\ \mathrm{N} × 60\ \mathrm{cm}$,解得$F'=200\ \mathrm{N}$。
(3) 沿竖直方向缓慢向下拉的过程中,支架绕转轴顺时针转动,拉力始终竖直向下,配重的重力也始终竖直向下:动力臂(支点到拉力作用线的垂直距离)逐渐变大,阻力臂(支点到配重重力作用线的垂直距离)逐渐变小,阻力大小不变,由杠杆平衡条件$F_{\mathrm{动}}l_{\mathrm{动}}=F_{\mathrm{阻}}l_{\mathrm{阻}}$,可知拉力大小变小。
【答案】
;200;变小
【知识点】
杠杆力臂画法,杠杆平衡条件
【点评】
本题以公园健身器材为载体,将杠杆知识点和实际应用结合,既考察了基础的力臂作图、静态杠杆平衡计算,又设置了动态力臂分析的小问,易错点是容易忽略两个力始终竖直向下的特点,误判力臂的变化趋势,整体能很好的检验学生对杠杆核心规律的理解程度。
【难度系数】
0.6
