【分析】
这道题围绕“探究杠杆的平衡条件”实验展开,覆盖基础操作、规律计算、图像分析、误差评估、创新应用全维度考点,解题思路可以按模块逐步推进:
1. 基础操作类:实验前杠杆调平遵循“左高左调、右高右调”原则,杠杆水平平衡时力臂与杠杆重合,可直接通过杠杆刻度读取力臂,明确该操作的目的。
2. 规律计算类:所有涉及钩码数量、力臂长度的计算,直接套用杠杆平衡条件$F_1l_1=F_2l_2$,对比两侧力与力臂的乘积大小即可判断杠杆倾斜方向。
3. 图像分析类:分析弹簧测力计夹角θ变化时动力臂的变化规律:θ从0°增大到90°时动力臂逐渐变大,θ从90°继续增大时动力臂逐渐变小,结合平衡条件反推拉力F的变化趋势即可匹配对应图像。
4. 误差评估类:分析弹簧测力计自身重力对测量结果的影响,多组力臂的实验操作的弊端,结合实验目的判断选项。
5. 创新应用类:将密度天平、颈椎模型转化为普通杠杆平衡问题,代入公式推导即可得到对应结果,结合生活常识给出合理建议。
【解析】
(1) 图甲中杠杆左端低右端高,为使杠杆在水平位置平衡,平衡螺母应向高的一侧即右侧移动;杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以直接从杠杆刻度上读取,目的是便于测量力臂大小。
(2) 假设每个钩码重力为G,每格长度为L,根据杠杆平衡条件:$2G× 3L = nG× 2L$,解得n=3,因此B位置挂3个钩码;两边同时再加一个钩码后,左侧力与力臂乘积为$3G×3L=9GL$,右侧为$4G×2L=8GL$,两侧乘积不相等,因此不能平衡,左侧乘积更大,杠杆将向左侧倾斜。
(3) 分析实验数据可直接得到杠杆的平衡条件:动力×动力臂=阻力×阻力臂,即$F_1l_1=F_2l_2$。
(4) 当弹簧测力计与水平方向夹角θ从0°增大到90°时,动力臂逐渐增大,拉力F逐渐减小;θ从90°增大到180°时,动力臂逐渐减小,拉力F逐渐增大;且θ不可能为0°,此时动力臂为0无法平衡,因此拉力F先减小后增大,对应图像B。
(5) 图丁中杠杆上多个位置悬挂钩码,力和力臂的数量过多,变量复杂,不易总结出普遍的杠杆平衡规律,因此不宜采用该方式,选C。
(6) 弹簧测力计自身有重力,当弹簧测力计竖直向下拉杠杆时,自身重力会分担一部分拉力,导致测得的动力F3偏小,因此出现$F_3l_3>F_4l_4$的情况;解决方法是在钩码的同侧竖直向上拉动弹簧测力计,消除弹簧测力计自身重力对实验的影响。
(7) ① 容器中没有液体时,根据杠杆平衡条件:$m_{容器}g× OA = m_{钩码}g× L$,代入数据$200g×10cm=50g× L$,解得L=40cm,因此零刻度标在右端离支点O40cm处。
② 钩码可移动的最远距离为杠杆右端到支点的50cm,此时左侧总重力对应的力臂乘积为$m_{总}g×10cm=50g× g×50cm$,解得$m_{总}=250g$,液体质量$m_{液}=250g-200g=50g$,液体体积为60mL,因此液体最大密度$\rho=\frac{50g}{60cm^3}\approx0.83g/cm^3$。
③ 增大密度天平的量程,可在相同力臂下提升最大可测量的左侧总重力,方法为增大钩码的质量(合理即可)。
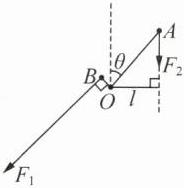
(8) ① 力臂是支点O到F2作用线的垂直距离,从O点向F2的作用线作垂线,垂线段长度即为F2的力臂。
② 分析表格数据可知,低头角度θ越大,对应的拉力F1数值越大,即颈椎肌肉产生的拉力随低头角度增大而增大。
③ 由数据可知,头颅重力为2N时,低头45°对应的拉力为8.8N,头颅重力与拉力成正比,因此头颅重力为50N时,拉力$F=\frac{50N}{2N}×8.8N=220N$。
④ 从保护颈椎的角度,可提出建议:尽量减少低头的时间和角度,例如在使用电子设备时,将设备屏幕抬高,使屏幕中心与眼睛在同一高度,避免长时间低头看手机或电脑。
【答案】
(1) 右 便于测量力臂大小
(2) 3 不能 左
(3) $F_1l_1=F_2l_2$
(4) B
(5) C
(6) 弹簧测力计自身受到重力 在钩码的同侧,竖直向上拉动弹簧测力计
(7) ① 40 ② 0.83 ③ 增大钩码的质量
(8) ① 如图所示
② 增大 ③ 220 ④ 尽量减少低头的时间和角度,例如在使用电子设备时,将设备屏幕抬高,使屏幕中心与眼睛在同一高度,避免长时间低头看手机或电脑
【知识点】
杠杆平衡条件
杠杆调平
杠杆的应用
【点评】
本题是一道综合性极强的杠杆实验探究题,从基础实验操作、规律验证,延伸到误差分析、图像辨析,再到密度天平、颈椎模型的创新应用,分层设置考点,既考察学生对基础知识点的掌握程度,又能锻炼学生将物理规律迁移到陌生场景的应用能力,符合新课标对探究类实验的能力考察要求。
【难度系数】
0.45
