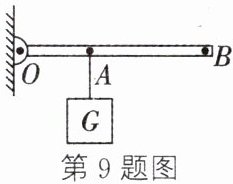
9 (易错题)如图所示,OAB 为一轻质杠杆,可绕支点 O 自由转动。若在 B 处施加一个动力使杠杆在水平位置平衡,则该杠杆(
A.一定是省力杠杆
B.一定是费力杠杆
C.一定是等臂杠杆
D.以上情况都有可能
D
)A.一定是省力杠杆
B.一定是费力杠杆
C.一定是等臂杠杆
D.以上情况都有可能
答案:9. D
易错分析
9. 因为在$B$点施加动力的方向不确定,所以动力臂的长度不确定,易把$OB$的长度误认是动力臂。
易错分析
9. 因为在$B$点施加动力的方向不确定,所以动力臂的长度不确定,易把$OB$的长度误认是动力臂。
解析:
【分析】
要判断杠杆的类型,核心是比较动力臂和阻力臂的大小关系。首先先确定本题的阻力和阻力臂:支点为O,A点悬挂的重物G对杠杆的拉力是阻力,阻力臂是支点O到阻力作用线的垂直距离,也就是OA,长度是固定不变的。接下来分析动力的情况:题目只说明在B点施加动力,并没有限定动力的方向,而动力臂的定义是支点O到动力作用线的垂直距离,并非支点到动力作用点B的连线OB的长度。我们可以调整动力的方向,得到不同长度的动力臂:动力臂可以大于OA、等于OA、也可以小于OA,对应省力、等臂、费力三种不同的杠杆类型,因此三种情况都有可能。
【解析】
1. 明确杠杆的判断依据:根据杠杆平衡条件$F_1L_1=F_2L_2$,杠杆的类型由动力臂$L_1$和阻力臂$L_2$的大小关系决定:$L_1>L_2$为省力杠杆,$L_1=L_2$为等臂杠杆,$L_1<L_2$为费力杠杆。
2. 确定本题的阻力与阻力臂:本题中阻力等于物重G,阻力臂是支点O到A点竖直向下拉力的垂直距离,即线段OA,长度固定。
3. 分析动力臂的可变范围:动力作用点固定在B点,但动力方向未作限制,动力臂是支点O到动力作用线的垂直距离:
当动力方向垂直于杠杆OB时,动力臂等于OB,显然OB>OA,此时动力臂大于阻力臂,杠杆为省力杠杆;
当动力取某一特定倾斜角度时,动力臂的长度可以恰好等于OA,此时动力臂等于阻力臂,杠杆为等臂杠杆;
当动力方向几乎沿OB杆的方向时,支点O到动力作用线的垂直距离会远小于OA,此时动力臂小于阻力臂,杠杆为费力杠杆。
因此三种杠杆类型都有可能,选项A、B、C的描述都错误,D正确。
【答案】
D
【知识点】
力臂的定义,杠杆平衡条件,杠杆分类
【点评】
本题是典型易错题,很多同学会错误将支点到动力作用点的距离OB直接当作动力臂,直接判定动力臂大于阻力臂选省力杠杆,忽略了动力方向未限定的前提,解题时要牢记力臂是支点到力的作用线的垂直距离,而非支点到力的作用点的连线长度,避免概念混淆。
【难度系数】
0.4
要判断杠杆的类型,核心是比较动力臂和阻力臂的大小关系。首先先确定本题的阻力和阻力臂:支点为O,A点悬挂的重物G对杠杆的拉力是阻力,阻力臂是支点O到阻力作用线的垂直距离,也就是OA,长度是固定不变的。接下来分析动力的情况:题目只说明在B点施加动力,并没有限定动力的方向,而动力臂的定义是支点O到动力作用线的垂直距离,并非支点到动力作用点B的连线OB的长度。我们可以调整动力的方向,得到不同长度的动力臂:动力臂可以大于OA、等于OA、也可以小于OA,对应省力、等臂、费力三种不同的杠杆类型,因此三种情况都有可能。
【解析】
1. 明确杠杆的判断依据:根据杠杆平衡条件$F_1L_1=F_2L_2$,杠杆的类型由动力臂$L_1$和阻力臂$L_2$的大小关系决定:$L_1>L_2$为省力杠杆,$L_1=L_2$为等臂杠杆,$L_1<L_2$为费力杠杆。
2. 确定本题的阻力与阻力臂:本题中阻力等于物重G,阻力臂是支点O到A点竖直向下拉力的垂直距离,即线段OA,长度固定。
3. 分析动力臂的可变范围:动力作用点固定在B点,但动力方向未作限制,动力臂是支点O到动力作用线的垂直距离:
当动力方向垂直于杠杆OB时,动力臂等于OB,显然OB>OA,此时动力臂大于阻力臂,杠杆为省力杠杆;
当动力取某一特定倾斜角度时,动力臂的长度可以恰好等于OA,此时动力臂等于阻力臂,杠杆为等臂杠杆;
当动力方向几乎沿OB杆的方向时,支点O到动力作用线的垂直距离会远小于OA,此时动力臂小于阻力臂,杠杆为费力杠杆。
因此三种杠杆类型都有可能,选项A、B、C的描述都错误,D正确。
【答案】
D
【知识点】
力臂的定义,杠杆平衡条件,杠杆分类
【点评】
本题是典型易错题,很多同学会错误将支点到动力作用点的距离OB直接当作动力臂,直接判定动力臂大于阻力臂选省力杠杆,忽略了动力方向未限定的前提,解题时要牢记力臂是支点到力的作用线的垂直距离,而非支点到力的作用点的连线长度,避免概念混淆。
【难度系数】
0.4
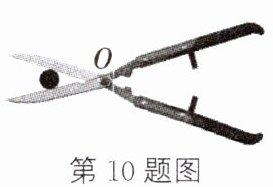
10 [2024 北京]如图所示,园艺工人在修剪枝条时,常把枝条尽量往剪刀的轴处靠近,这样做是为了(
A.增大动力臂,能够省力
B.增大阻力臂,方便使用
C.减小动力臂,方便使用
D.减小阻力臂,能够省力
D
)A.增大动力臂,能够省力
B.增大阻力臂,方便使用
C.减小动力臂,方便使用
D.减小阻力臂,能够省力
答案:10. D
解析:
【分析】
首先我们把剪刀抽象为杠杆模型,第一步先确定支点是剪刀的转轴O;第二步明确杠杆的相关要素:手对剪刀手柄的作用力是动力,支点到动力作用线的距离为动力臂,枝条对剪刀刃的反作用力是阻力,支点到阻力作用线的距离为阻力臂。接下来分析操作的影响:把枝条往轴处靠近时,手的握持位置没有变化,动力臂大小不变,枝条的硬度不变,阻力大小也基本不变,只有枝条的位置离支点更近,对应的阻力臂变小。最后结合杠杆平衡条件推导动力的变化,就能得到该操作的目的。
【解析】
解:剪刀属于杠杆,支点为转轴O:
1. 修剪枝条时,手施加的动力作用在手柄处,动力臂的长度由手的握持位置决定,将枝条往轴处靠近时动力臂几乎不变;
2. 枝条对剪刀的阻力等于剪刀对枝条的作用力,大小基本不变,枝条向支点O靠近时,支点到阻力作用线的距离即阻力臂$ L_2 $减小;
3. 根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $,变形可得动力 $ F_1 = \frac{F_2L_2}{L_1} $,在$ F_2 $、$ L_1 $不变的情况下,$ L_2 $减小则动力$ F_1 $减小,因此该操作的目的是减小阻力臂,实现省力的效果。
因此选项D正确,A、B、C错误。
【答案】
D
【知识点】
杠杆平衡条件;力臂判断
【点评】
本题是生活场景下的杠杆应用题,核心易错点是不要混淆动力臂和阻力臂的变化:操作中手的位置没有改变,动力臂不会发生变化,改变的是阻力的作用位置,从而减小阻力臂实现省力,解题时先明确杠杆的五要素,再结合平衡条件推导即可快速得到结论。
【难度系数】
0.8
首先我们把剪刀抽象为杠杆模型,第一步先确定支点是剪刀的转轴O;第二步明确杠杆的相关要素:手对剪刀手柄的作用力是动力,支点到动力作用线的距离为动力臂,枝条对剪刀刃的反作用力是阻力,支点到阻力作用线的距离为阻力臂。接下来分析操作的影响:把枝条往轴处靠近时,手的握持位置没有变化,动力臂大小不变,枝条的硬度不变,阻力大小也基本不变,只有枝条的位置离支点更近,对应的阻力臂变小。最后结合杠杆平衡条件推导动力的变化,就能得到该操作的目的。
【解析】
解:剪刀属于杠杆,支点为转轴O:
1. 修剪枝条时,手施加的动力作用在手柄处,动力臂的长度由手的握持位置决定,将枝条往轴处靠近时动力臂几乎不变;
2. 枝条对剪刀的阻力等于剪刀对枝条的作用力,大小基本不变,枝条向支点O靠近时,支点到阻力作用线的距离即阻力臂$ L_2 $减小;
3. 根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $,变形可得动力 $ F_1 = \frac{F_2L_2}{L_1} $,在$ F_2 $、$ L_1 $不变的情况下,$ L_2 $减小则动力$ F_1 $减小,因此该操作的目的是减小阻力臂,实现省力的效果。
因此选项D正确,A、B、C错误。
【答案】
D
【知识点】
杠杆平衡条件;力臂判断
【点评】
本题是生活场景下的杠杆应用题,核心易错点是不要混淆动力臂和阻力臂的变化:操作中手的位置没有改变,动力臂不会发生变化,改变的是阻力的作用位置,从而减小阻力臂实现省力,解题时先明确杠杆的五要素,再结合平衡条件推导即可快速得到结论。
【难度系数】
0.8
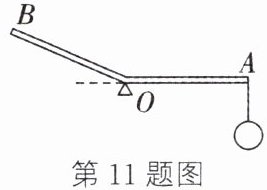
11 如图所示,AOB 为一杠杆,O 点为支点,杠杆自重不计,$AO=OB$。在杠杆右端 A 处用细绳悬挂重为$G$的物体,当$AO$段处于水平位置时,为了保持杠杆平衡,需在$B$端施加最小的力$F_1$;当$OB$段在水平位置时,为保持杠杆平衡,这时需在$B$端施加最小的力$F_2$,则(
A.$F_1<F_2$
B.$F_1>F_2$
C.$F_1=F_2$
D.无法比较
B
)A.$F_1<F_2$
B.$F_1>F_2$
C.$F_1=F_2$
D.无法比较
答案:11. B
解析:
【分析】
我们可以按照以下思路逐步解题:首先回忆杠杆平衡的规律,要在B端施加最小的力,就需要让动力臂取到最大值,最大动力臂就是支点O到B点的连线OB的长度,也就是动力方向垂直于OB时,动力最小,这是求解最小力的核心依据。接下来分两种状态分别分析力臂:第一种状态是AO段处于水平位置,此时重物的拉力竖直向下,阻力臂恰好等于AO的长度;第二种状态是OB段处于水平位置,此时AO是倾斜的,支点到竖直向下的重力作用线的垂直距离(阻力臂)会小于AO的长度。最后结合AO=OB的已知条件,代入杠杆平衡公式分别计算两个力的大小,就能直接比较二者的关系。
【解析】
解:杠杆平衡条件为 $ F_{\mathrm{动}}L_{\mathrm{动}} = F_{\mathrm{阻}}L_{\mathrm{阻}} $,要得到B端的最小力,需让动力臂取最大值,即动力方向垂直于OB,此时动力臂等于OB的长度。
1. 当AO段处于水平位置时:
阻力为悬挂物体的重力G,阻力臂是支点O到竖直向下的重力作用线的垂直距离,恰好等于AO的长度。
代入杠杆平衡公式:$ F_1 · OB = G · AO $
已知AO=OB,因此化简可得 $ F_1 = G $。
2. 当OB段处于水平位置时:
此时AO段为倾斜状态,阻力仍为G,支点O到竖直向下的重力作用线的垂直距离(阻力臂)小于AO的长度,记为$ L_{\mathrm{阻}} < AO $。
代入杠杆平衡公式:$ F_2 · OB = G · L_{\mathrm{阻}} $
因为$ L_{\mathrm{阻}} < AO $,且AO=OB,因此$ F_2 · OB < G · AO = G · OB $,化简可得$ F_2 < G $。
对比两个结果可得:$ F_1 = G > F_2 $,即$ F_1 > F_2 $。
【答案】
B
【知识点】
杠杆平衡条件,最小力判断
【点评】
本题的易错点是容易错误认为两次的阻力臂都等于AO的长度,忽略了力臂的定义是支点到力的作用线的垂直距离,只有当杠杆和力的方向垂直时,力臂才等于杠杆自身的长度。解题的核心是准确区分两种状态下的阻力臂大小,结合最大动力臂的规律推导结果。
【难度系数】
0.6
我们可以按照以下思路逐步解题:首先回忆杠杆平衡的规律,要在B端施加最小的力,就需要让动力臂取到最大值,最大动力臂就是支点O到B点的连线OB的长度,也就是动力方向垂直于OB时,动力最小,这是求解最小力的核心依据。接下来分两种状态分别分析力臂:第一种状态是AO段处于水平位置,此时重物的拉力竖直向下,阻力臂恰好等于AO的长度;第二种状态是OB段处于水平位置,此时AO是倾斜的,支点到竖直向下的重力作用线的垂直距离(阻力臂)会小于AO的长度。最后结合AO=OB的已知条件,代入杠杆平衡公式分别计算两个力的大小,就能直接比较二者的关系。
【解析】
解:杠杆平衡条件为 $ F_{\mathrm{动}}L_{\mathrm{动}} = F_{\mathrm{阻}}L_{\mathrm{阻}} $,要得到B端的最小力,需让动力臂取最大值,即动力方向垂直于OB,此时动力臂等于OB的长度。
1. 当AO段处于水平位置时:
阻力为悬挂物体的重力G,阻力臂是支点O到竖直向下的重力作用线的垂直距离,恰好等于AO的长度。
代入杠杆平衡公式:$ F_1 · OB = G · AO $
已知AO=OB,因此化简可得 $ F_1 = G $。
2. 当OB段处于水平位置时:
此时AO段为倾斜状态,阻力仍为G,支点O到竖直向下的重力作用线的垂直距离(阻力臂)小于AO的长度,记为$ L_{\mathrm{阻}} < AO $。
代入杠杆平衡公式:$ F_2 · OB = G · L_{\mathrm{阻}} $
因为$ L_{\mathrm{阻}} < AO $,且AO=OB,因此$ F_2 · OB < G · AO = G · OB $,化简可得$ F_2 < G $。
对比两个结果可得:$ F_1 = G > F_2 $,即$ F_1 > F_2 $。
【答案】
B
【知识点】
杠杆平衡条件,最小力判断
【点评】
本题的易错点是容易错误认为两次的阻力臂都等于AO的长度,忽略了力臂的定义是支点到力的作用线的垂直距离,只有当杠杆和力的方向垂直时,力臂才等于杠杆自身的长度。解题的核心是准确区分两种状态下的阻力臂大小,结合最大动力臂的规律推导结果。
【难度系数】
0.6
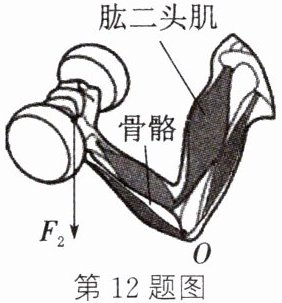
12 如图所示,举着哑铃的前臂骨骼可以看成杠杆,请作出动力 $F_1$ 的示意图及阻力 $F_2$ 的力臂 $l_2$。
答案:
12. 如图所示

12. 如图所示
解析:
【分析】
首先明确该杠杆的支点为图中的O点:
1. 确定动力F₁:动力是肱二头肌收缩对前臂骨骼的拉力,作用点在肱二头肌与前臂的连接位置,方向沿肱二头肌向上,拉动前臂绕O点转动,因此从该作用点沿肌肉收缩向上的方向画出带箭头的线段,标注F₁即可。
2. 确定阻力F₂的力臂l₂:力臂的定义是支点到力的作用线的垂直距离,首先将阻力F₂的作用线适当延长,从支点O向F₂的作用线作垂线,支点O到垂足之间的垂线段就是阻力F₂的力臂l₂,标注对应的符号即可。
【解析】
作图步骤如下:
① 画动力F₁:在肱二头肌与前臂骨骼的附着点处,沿肱二头肌收缩的斜向上方向画出拉力,线段末端标注箭头,旁注F₁。
② 画阻力臂l₂:从支点O出发,向阻力F₂的竖直向下的作用线作垂线段,标注垂直符号,该垂线段即为l₂,在旁标注l₂。
【答案】
【知识点】
杠杆力的示意图,力臂的画法
【点评】
本题结合人体前臂的实际情景考查杠杆作图,属于基础应用型题目,易错点是误将动力方向画为向下,或是画力臂时遗漏垂直标注,要注意前臂属于费力杠杆,动力作用点距离支点很近,动力臂小于阻力臂。
【难度系数】
0.6
首先明确该杠杆的支点为图中的O点:
1. 确定动力F₁:动力是肱二头肌收缩对前臂骨骼的拉力,作用点在肱二头肌与前臂的连接位置,方向沿肱二头肌向上,拉动前臂绕O点转动,因此从该作用点沿肌肉收缩向上的方向画出带箭头的线段,标注F₁即可。
2. 确定阻力F₂的力臂l₂:力臂的定义是支点到力的作用线的垂直距离,首先将阻力F₂的作用线适当延长,从支点O向F₂的作用线作垂线,支点O到垂足之间的垂线段就是阻力F₂的力臂l₂,标注对应的符号即可。
【解析】
作图步骤如下:
① 画动力F₁:在肱二头肌与前臂骨骼的附着点处,沿肱二头肌收缩的斜向上方向画出拉力,线段末端标注箭头,旁注F₁。
② 画阻力臂l₂:从支点O出发,向阻力F₂的竖直向下的作用线作垂线段,标注垂直符号,该垂线段即为l₂,在旁标注l₂。
【答案】
【知识点】
杠杆力的示意图,力臂的画法
【点评】
本题结合人体前臂的实际情景考查杠杆作图,属于基础应用型题目,易错点是误将动力方向画为向下,或是画力臂时遗漏垂直标注,要注意前臂属于费力杠杆,动力作用点距离支点很近,动力臂小于阻力臂。
【难度系数】
0.6
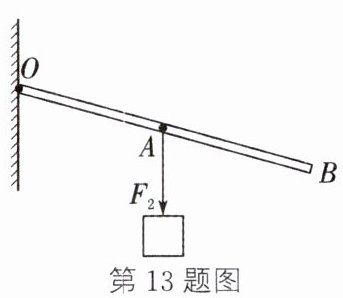
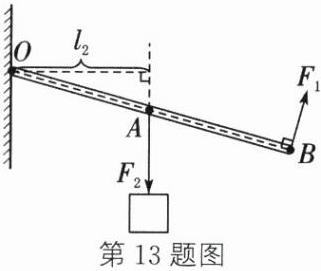
13 图中,用直棒提升重物,请作出图示位置所用最小力 $F_{1}$ 和阻力 $F_{2}$ 的力臂 $l_{2}$。
答案:
13. 如图所示
13. 如图所示
解析:
【分析】
要解决这道杠杆作图题,我们可以按照以下思路思考:
1. 首先明确支点是O点,根据杠杆平衡条件$F_1L_1=F_2L_2$,在阻力、阻力臂固定的情况下,动力臂越长,对应的动力就越小,要画出最小的$F_1$,就需要先找到最长的动力臂。
2. 杠杆上所有点里,距离支点O最远的端点是B点,因此连接O、B两点得到的线段OB就是最长的动力臂,此时过B点作垂直于OB的力,就是最小动力,为了让杠杆向上抬起重物,力的方向要斜向上。
3. 画阻力$F_2$的力臂$l_2$时,按照力臂的定义:从支点向力的作用线作垂线段,这个垂线段就是对应力的力臂,因此从O点向竖直向下的$F_2$的作用线作垂线,支点到垂足的线段就是$l_2$。
【解析】
1. 作最小动力$F_1$:
① 支点为O,杠杆上离O最远的点为B,连接OB得到最长动力臂;
② 过B点作垂直于OB、方向斜向上的线段,标注箭头和$F_1$,即为最小动力。
2. 作阻力臂$l_2$:
① 沿$F_2$的竖直向下方向适当延长其作用线;
② 从支点O向$F_2$的作用线作垂线段,标注垂直符号,在该垂线段旁标注$l_2$,即为阻力臂。
【答案】
【知识点】
杠杆最小力画法,力臂作图,杠杆平衡条件
【点评】
本题是杠杆作图的经典题型,核心考察对杠杆平衡条件的应用和力臂的规范绘制,易错点集中在最小动力的方向判断、力臂漏标垂直符号两个地方,需要牢记“最长动力臂为支点到动力作用点的连线,最小力与该连线垂直”的规律。
【难度系数】
0.6
要解决这道杠杆作图题,我们可以按照以下思路思考:
1. 首先明确支点是O点,根据杠杆平衡条件$F_1L_1=F_2L_2$,在阻力、阻力臂固定的情况下,动力臂越长,对应的动力就越小,要画出最小的$F_1$,就需要先找到最长的动力臂。
2. 杠杆上所有点里,距离支点O最远的端点是B点,因此连接O、B两点得到的线段OB就是最长的动力臂,此时过B点作垂直于OB的力,就是最小动力,为了让杠杆向上抬起重物,力的方向要斜向上。
3. 画阻力$F_2$的力臂$l_2$时,按照力臂的定义:从支点向力的作用线作垂线段,这个垂线段就是对应力的力臂,因此从O点向竖直向下的$F_2$的作用线作垂线,支点到垂足的线段就是$l_2$。
【解析】
1. 作最小动力$F_1$:
① 支点为O,杠杆上离O最远的点为B,连接OB得到最长动力臂;
② 过B点作垂直于OB、方向斜向上的线段,标注箭头和$F_1$,即为最小动力。
2. 作阻力臂$l_2$:
① 沿$F_2$的竖直向下方向适当延长其作用线;
② 从支点O向$F_2$的作用线作垂线段,标注垂直符号,在该垂线段旁标注$l_2$,即为阻力臂。
【答案】
【知识点】
杠杆最小力画法,力臂作图,杠杆平衡条件
【点评】
本题是杠杆作图的经典题型,核心考察对杠杆平衡条件的应用和力臂的规范绘制,易错点集中在最小动力的方向判断、力臂漏标垂直符号两个地方,需要牢记“最长动力臂为支点到动力作用点的连线,最小力与该连线垂直”的规律。
【难度系数】
0.6
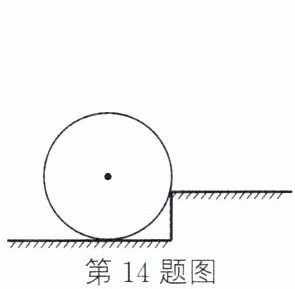
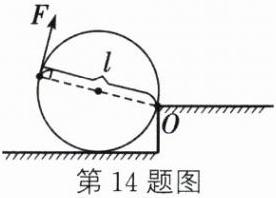
14 如图所示,张师傅想用最省力的方法把一个油桶推上台阶。请你在图中作出杠杆的支点O、最省力的力臂$l$以及最小动力$F$的方向。
答案:
14. 如图所示
14. 如图所示
解析:
【分析】
要解决这个最省力推油桶上台阶的问题,首先依据杠杆平衡原理:在阻力、阻力臂一定时,动力臂越长,对应的动力越小也就越省力。第一步先确定杠杆的支点:油桶被推上台阶的过程中,是绕着台阶和油桶的接触棱角转动的,这个点就是支点O。接下来要找到最长的动力臂:支点到油桶边缘上所有点的连线里,最长的连线就是从支点出发经过油桶圆心,延伸到油桶另一侧边缘的线段,这就是最长力臂l。最后动力的方向需要垂直于这个最长力臂,斜向上,才能让油桶顺利绕支点向上转动,得到最小的动力F。
【解析】
1. 确定支点:油桶绕台阶的棱角(油桶与台阶的接触点)转动,标记该点为支点O;
2. 作最长动力臂:连接支点O与油桶的圆心,将该连线延长,与油桶的圆周交于离O点最远的点,支点O到这个最远点的线段就是最长动力臂l;
3. 画最小动力:过最远点作垂直于力臂l的作用力F,方向斜向上,保证动力的效果是让油桶绕支点向上滚上台阶,此时F就是最小的动力。
【答案】
【知识点】
杠杆平衡条件,最小力作图,支点判断
【点评】
本题是杠杆最小力作图的典型习题,易错点是误将油桶与地面的接触点当作支点,或是无法正确找到最长动力臂。解题核心要牢记:杠杆上最长动力臂就是支点到动力作用点的最大距离,本题中该长度恰好等于油桶的直径,掌握这个规律就能快速完成作图。
【难度系数】
0.6
要解决这个最省力推油桶上台阶的问题,首先依据杠杆平衡原理:在阻力、阻力臂一定时,动力臂越长,对应的动力越小也就越省力。第一步先确定杠杆的支点:油桶被推上台阶的过程中,是绕着台阶和油桶的接触棱角转动的,这个点就是支点O。接下来要找到最长的动力臂:支点到油桶边缘上所有点的连线里,最长的连线就是从支点出发经过油桶圆心,延伸到油桶另一侧边缘的线段,这就是最长力臂l。最后动力的方向需要垂直于这个最长力臂,斜向上,才能让油桶顺利绕支点向上转动,得到最小的动力F。
【解析】
1. 确定支点:油桶绕台阶的棱角(油桶与台阶的接触点)转动,标记该点为支点O;
2. 作最长动力臂:连接支点O与油桶的圆心,将该连线延长,与油桶的圆周交于离O点最远的点,支点O到这个最远点的线段就是最长动力臂l;
3. 画最小动力:过最远点作垂直于力臂l的作用力F,方向斜向上,保证动力的效果是让油桶绕支点向上滚上台阶,此时F就是最小的动力。
【答案】
【知识点】
杠杆平衡条件,最小力作图,支点判断
【点评】
本题是杠杆最小力作图的典型习题,易错点是误将油桶与地面的接触点当作支点,或是无法正确找到最长动力臂。解题核心要牢记:杠杆上最长动力臂就是支点到动力作用点的最大距离,本题中该长度恰好等于油桶的直径,掌握这个规律就能快速完成作图。
【难度系数】
0.6
15 新素养 科学探究 如图所示是某兴趣小组自制的一把杆秤,杆秤自重不计,A 点与提组 O 点间的距离是 5 cm,秤砣的质量 $m=0.5\ \mathrm{kg}$。
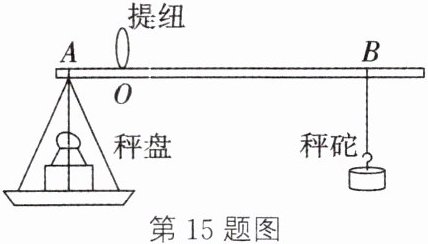
(1) 若称量质量 $M=1.8\ \mathrm{kg}$ 的重物,秤砣移到 B 点时杆秤平衡,则 B 点与 O 点间的距离是
(2) 秤砣用旧后质量减小,称量物体时,称得物体的质量
(3) 若提纽向 A 端移动一小段距离,重新标出刻度,发现杆秤的称量范围将
(1) 若称量质量 $M=1.8\ \mathrm{kg}$ 的重物,秤砣移到 B 点时杆秤平衡,则 B 点与 O 点间的距离是
18
cm。(2) 秤砣用旧后质量减小,称量物体时,称得物体的质量
偏大
(偏大/不变/偏小)。(3) 若提纽向 A 端移动一小段距离,重新标出刻度,发现杆秤的称量范围将
变大
(变大/变小)。答案:15. (1) 18 (2) 偏大 (3) 变大 【解析】(1) 由杠杆平衡条件得,$Mg× OA=mg× OB$,则$1.8\ \mathrm{kg}×5\ \mathrm{cm}=0.5\ \mathrm{kg}× OB$,解得$OB=18\ \mathrm{cm}$。(2) 由杠杆平衡条件得,$Mg× OA=mg× OB$,可知$OB=\dfrac{M× OA}{m}$,秤砣用旧后质量$m$减小,$OA$不变,称量相同物体$M$时,$OB$变大,称得物体质量偏大。(3) 提纽向$A$端移动一小段距离,$OA$变小,秤砣的质量$m$不变,$OB$变大,由杠杆平衡条件有$Mg× OA=mg× OB$,可知$M$变大,杆秤的称量范围变大。
解析:
【分析】
这道题是杠杆平衡条件在生活工具杆秤中的应用,全程围绕杠杆平衡条件$F_1L_1=F_2L_2$展开思考:
1. 第一小问,杆秤自重不计,重物对A点的拉力等于重物重力,秤砣对B点的拉力等于秤砣重力,提纽O是支点,已知重物重力、阻力臂OA、秤砣重力,直接代入杠杆平衡公式就能求出动力臂OB的长度。
2. 第二小问,称量同一实际质量的物体时,OA、物体重力都不变,若秤砣质量m变小,要满足杠杆平衡,对应的秤砣力臂OB就会比正常情况更大,而杆秤的刻度是按标准秤砣标定的,OB越大对应的读数就越大,由此就能判断测量值的偏差。
3. 第三小问,提纽向A移动后,支点O靠近A,阻力臂OA变小,同时秤砣能移动的最大距离(从新支点到杆最右端的长度)也比原来的最大OB更大,代入平衡公式就能得到可称量的最大物体质量变大,即可判断称量范围的变化。
【解析】
(1) 根据杠杆平衡条件$F_1L_1=F_2L_2$,可得:
$Mg· OA = mg· OB$,等式两边的g可以约去,代入已知数值$M=1.8\ \mathrm{kg}$,$OA=5\ \mathrm{cm}$,$m=0.5\ \mathrm{kg}$:
$1.8\ \mathrm{kg} × 5\ \mathrm{cm} = 0.5\ \mathrm{kg} × OB$
解得$OB = \frac{1.8\ \mathrm{kg} × 5\ \mathrm{cm}}{0.5\ \mathrm{kg}} = 18\ \mathrm{cm}$。
(2) 由杠杆平衡公式变形可得$OB = \frac{M· OA}{m}$,当称量实际质量为M的物体时,OA、M均不变,秤砣用旧后质量m减小,那么对应的OB会比标准情况更大,杆秤的刻度是按照标准秤砣标定的,OB越大对应的刻度读数越大,因此称得物体的质量偏大。
(3) 提纽向A端移动后,支点O到A的距离OA变小,秤砣质量m不变,秤砣可到达的最远端距离新支点O的最大OB比原来更大,由平衡公式变形得$M=\frac{m· OB}{OA}$,OA变小、最大OB变大,可测得的最大物体质量M变大,因此杆秤的称量范围将变大。
【答案】
(1) 18 (2) 偏大 (3) 变大
【知识点】
杠杆平衡条件;杠杆的应用
【点评】
本题结合自制杆秤的实践场景命题,跳出了直接套用杠杆公式的基础考法,重点考察学生对杠杆平衡条件的动态推导能力,易错点是第三问提纽移动后量程的判断,需要学生理清支点变化后力臂的联动变化,避免凭直觉错判,能很好地锻炼学生用物理规律解决实际工具问题的能力。
【难度系数】
0.7
这道题是杠杆平衡条件在生活工具杆秤中的应用,全程围绕杠杆平衡条件$F_1L_1=F_2L_2$展开思考:
1. 第一小问,杆秤自重不计,重物对A点的拉力等于重物重力,秤砣对B点的拉力等于秤砣重力,提纽O是支点,已知重物重力、阻力臂OA、秤砣重力,直接代入杠杆平衡公式就能求出动力臂OB的长度。
2. 第二小问,称量同一实际质量的物体时,OA、物体重力都不变,若秤砣质量m变小,要满足杠杆平衡,对应的秤砣力臂OB就会比正常情况更大,而杆秤的刻度是按标准秤砣标定的,OB越大对应的读数就越大,由此就能判断测量值的偏差。
3. 第三小问,提纽向A移动后,支点O靠近A,阻力臂OA变小,同时秤砣能移动的最大距离(从新支点到杆最右端的长度)也比原来的最大OB更大,代入平衡公式就能得到可称量的最大物体质量变大,即可判断称量范围的变化。
【解析】
(1) 根据杠杆平衡条件$F_1L_1=F_2L_2$,可得:
$Mg· OA = mg· OB$,等式两边的g可以约去,代入已知数值$M=1.8\ \mathrm{kg}$,$OA=5\ \mathrm{cm}$,$m=0.5\ \mathrm{kg}$:
$1.8\ \mathrm{kg} × 5\ \mathrm{cm} = 0.5\ \mathrm{kg} × OB$
解得$OB = \frac{1.8\ \mathrm{kg} × 5\ \mathrm{cm}}{0.5\ \mathrm{kg}} = 18\ \mathrm{cm}$。
(2) 由杠杆平衡公式变形可得$OB = \frac{M· OA}{m}$,当称量实际质量为M的物体时,OA、M均不变,秤砣用旧后质量m减小,那么对应的OB会比标准情况更大,杆秤的刻度是按照标准秤砣标定的,OB越大对应的刻度读数越大,因此称得物体的质量偏大。
(3) 提纽向A端移动后,支点O到A的距离OA变小,秤砣质量m不变,秤砣可到达的最远端距离新支点O的最大OB比原来更大,由平衡公式变形得$M=\frac{m· OB}{OA}$,OA变小、最大OB变大,可测得的最大物体质量M变大,因此杆秤的称量范围将变大。
【答案】
(1) 18 (2) 偏大 (3) 变大
【知识点】
杠杆平衡条件;杠杆的应用
【点评】
本题结合自制杆秤的实践场景命题,跳出了直接套用杠杆公式的基础考法,重点考察学生对杠杆平衡条件的动态推导能力,易错点是第三问提纽移动后量程的判断,需要学生理清支点变化后力臂的联动变化,避免凭直觉错判,能很好地锻炼学生用物理规律解决实际工具问题的能力。
【难度系数】
0.7