【分析】
这道题是力学综合题,我们可以分小问逐步梳理思路:
1. 第(1)问求斜面的机械效率,首先回忆机械效率的定义是有用功与总功的比值。先从题图中提取斜面长度s和货物被提升的高度h,总功是推力F₁做的功,用W总=Fs计算,有用功是克服货物重力做的功,用W有用=Gh计算,代入效率公式就能算出结果。
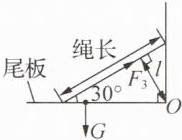
2. 第(2)问①画力臂,牢记力臂的标准画法:先找到支点O,再延长力F₃的作用线,最后从支点向力的作用线作垂线段,这个垂线段就是对应的力臂l。
3. 第(2)问②比较两次拉力的大小,利用杠杆平衡条件分析:先明确两次的阻力(尾板重力)、阻力臂都没有变化,再通过几何关系判断两次拉力的动力臂长度相等,代入杠杆平衡公式就能得到两次拉力相等;再对比动力臂和阻力臂的大小,就能判断杠杆的类型。
【解析】
(1) 由题图1可知,货物沿斜面移动的距离s=2m,上升的竖直高度h=0.5m:
推力做的总功:$W_{\mathrm{总}}=F_1 s = 200\ \mathrm{N} × 2\ \mathrm{m} = 400\ \mathrm{J}$
克服货物重力做的有用功:$W_{\mathrm{有用}}=Gh=400\ \mathrm{N} × 0.5\ \mathrm{m} = 200\ \mathrm{J}$
斜面的机械效率:$\eta = \dfrac{W_{\mathrm{有用}}}{W_{\mathrm{总}}} × 100\% = \dfrac{200\ \mathrm{J}}{400\ \mathrm{J}} × 100\% = 50\%$
(2) ① 作图步骤:确定支点O,将$F_3$的作用线适当延长,从O点向$F_3$的作用线作垂线,该垂线段就是$F_3$的力臂l。
② 对比图3和图4的情况:尾板的重力G作为阻力,大小不变,支点O到重力作用线的阻力臂也不变;两次拉力的动力臂都是支点到绳子拉力作用线的垂线段,由几何全等关系可知两次动力臂长度完全相等。根据杠杆平衡条件$F_动 l_动 = F_阻 l_阻$,可得两次拉力大小相等,即$F_4 = F_3$;图4中杠杆的动力臂小于阻力臂,因此属于费力杠杆。
【答案】
(1) $\boldsymbol{50\%}$
(2) ①
② $\boldsymbol{=}$;$\boldsymbol{费力}$
【知识点】
斜面机械效率、力臂作图、杠杆平衡应用
【点评】
本题综合考查了斜面机械效率和杠杆的相关知识点,属于基础力学综合题型。易错点是第(2)问中两次拉力的大小判断,很多同学会错误认为绳子倾斜后动力臂变小拉力变大,解题时要结合几何关系准确判断动力臂的变化,再利用杠杆平衡条件推导结果,同时牢记杠杆分类的判断依据是动力臂和阻力臂的相对大小。
【难度系数】
0.6
