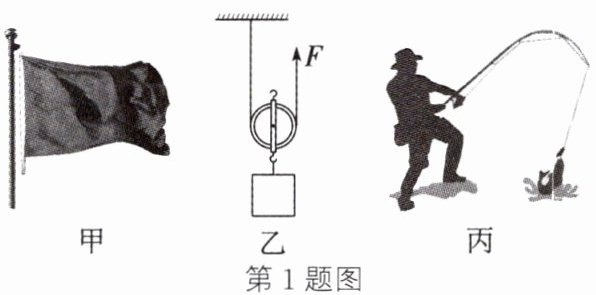
1 使用简单机械可以给人们的生活带来便利。
(1) 如图甲所示,旗杆的顶端安装着一个定滑轮,用来
(2) 如图乙所示,小明用 20 N 的力将重为 30 N 的物体匀速提升 2 m,不计绳重与摩擦,则动滑轮重为
(3) 如图丙所示为某人钓起一条鱼时的情景,为了省力一些,两手之间的距离应
(1) 如图甲所示,旗杆的顶端安装着一个定滑轮,用来
改变力的方向
。(2) 如图乙所示,小明用 20 N 的力将重为 30 N 的物体匀速提升 2 m,不计绳重与摩擦,则动滑轮重为
10
N,绳子自由端移动的距离为 4
m。(3) 如图丙所示为某人钓起一条鱼时的情景,为了省力一些,两手之间的距离应
大
(大/小)一些。答案:1. (1) 改变力的方向 (2) 10 4 (3) 大
解析:
【分析】
我们逐个小问梳理解题思路:
1. 第一问回忆定滑轮的工作特性,定滑轮实质是等臂杠杆,不省力也不省距离,旗杆顶端安装它的作用就是改变力的方向,让人站在地面向下拉绳子就能把旗帜升到高处,操作更便捷。
2. 第二问针对图乙的动滑轮,首先确定该动滑轮承担物重的绳子段数n=2,不计绳重和摩擦时,拉力满足公式F=(G物+G动)/2,代入已知的拉力和物重数值就能算出动滑轮重力;再根据动滑轮绳子自由端移动距离s和物体上升高度h的关系s=nh,代入物体上升的2m即可算出绳子自由端移动的距离。
3. 第三问钓鱼竿属于杠杆,支点在人手靠近身体的握点,鱼对鱼竿的拉力是阻力,靠前的手对鱼竿的力是动力,根据杠杆平衡条件F₁L₁=F₂L₂,在阻力、阻力臂都不变的情况下,增大两手间距本质是增大动力臂,所需的动力就会更小,也就更省力。
【解析】
(1) 定滑轮的实质是等臂杠杆,使用过程中不省力,但可以改变作用力的方向,旗杆顶端的定滑轮就是用来改变力的方向,方便人在地面向下拉绳将旗帜升起。
(2) 图乙中动滑轮承担物重的绳子段数n=2,不计绳重与摩擦,由F=(G+G动)/2可得,动滑轮的重力:G动=2F - G = 2×20N - 30N =10N;绳子自由端移动的距离:s=nh=2×2m=4m。
(3) 钓鱼竿属于杠杆,钓起鱼时阻力和阻力臂固定不变,若两手之间的距离变大,动力臂就会随之变大,根据杠杆平衡条件,所需的动力会变小,也就更省力,因此为了省力,两手之间的距离应大一些。
【答案】
(1) 改变力的方向 (2) 10;4 (3) 大
【知识点】
定滑轮的特点,动滑轮的计算,杠杆平衡条件
【点评】
本题结合旗杆提旗、动滑轮提重物、钓鱼竿钓鱼三个生活常见场景,分别考察定滑轮特性、动滑轮相关计算、杠杆平衡条件的实际应用,整体贴合基础知识点,只要学生准确掌握各类简单机械的工作原理,结合场景灵活套用公式就能顺利解题。
【难度系数】
0.8
我们逐个小问梳理解题思路:
1. 第一问回忆定滑轮的工作特性,定滑轮实质是等臂杠杆,不省力也不省距离,旗杆顶端安装它的作用就是改变力的方向,让人站在地面向下拉绳子就能把旗帜升到高处,操作更便捷。
2. 第二问针对图乙的动滑轮,首先确定该动滑轮承担物重的绳子段数n=2,不计绳重和摩擦时,拉力满足公式F=(G物+G动)/2,代入已知的拉力和物重数值就能算出动滑轮重力;再根据动滑轮绳子自由端移动距离s和物体上升高度h的关系s=nh,代入物体上升的2m即可算出绳子自由端移动的距离。
3. 第三问钓鱼竿属于杠杆,支点在人手靠近身体的握点,鱼对鱼竿的拉力是阻力,靠前的手对鱼竿的力是动力,根据杠杆平衡条件F₁L₁=F₂L₂,在阻力、阻力臂都不变的情况下,增大两手间距本质是增大动力臂,所需的动力就会更小,也就更省力。
【解析】
(1) 定滑轮的实质是等臂杠杆,使用过程中不省力,但可以改变作用力的方向,旗杆顶端的定滑轮就是用来改变力的方向,方便人在地面向下拉绳将旗帜升起。
(2) 图乙中动滑轮承担物重的绳子段数n=2,不计绳重与摩擦,由F=(G+G动)/2可得,动滑轮的重力:G动=2F - G = 2×20N - 30N =10N;绳子自由端移动的距离:s=nh=2×2m=4m。
(3) 钓鱼竿属于杠杆,钓起鱼时阻力和阻力臂固定不变,若两手之间的距离变大,动力臂就会随之变大,根据杠杆平衡条件,所需的动力会变小,也就更省力,因此为了省力,两手之间的距离应大一些。
【答案】
(1) 改变力的方向 (2) 10;4 (3) 大
【知识点】
定滑轮的特点,动滑轮的计算,杠杆平衡条件
【点评】
本题结合旗杆提旗、动滑轮提重物、钓鱼竿钓鱼三个生活常见场景,分别考察定滑轮特性、动滑轮相关计算、杠杆平衡条件的实际应用,整体贴合基础知识点,只要学生准确掌握各类简单机械的工作原理,结合场景灵活套用公式就能顺利解题。
【难度系数】
0.8
2 [2025 无锡]如图所示,探究杠杆的平衡条件,调节杠杆水平平衡后,在杠杆的左边 20 cm 处挂 2 个钩码,在杠杆的右边 10 cm 处用弹簧测力计竖直向下拉,使杠杆在水平位置重新平衡,此时弹簧测力计的示数为
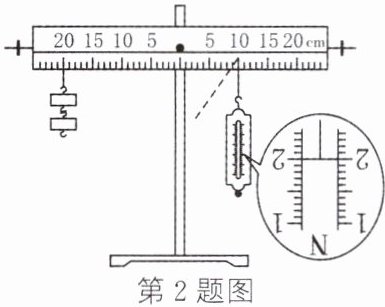
2
N;若弹簧测力计沿图中虚线方向向下拉,使杠杆在水平位置重新平衡,则弹簧测力计示数会变大
(变大/不变/变小),原因是动力臂变小,阻力和阻力臂不变,则动力即拉力会变大
。答案:2. 2 变大 动力臂变小,阻力和阻力臂不变,则动力即拉力会变大
解析:
【分析】
首先第一步先读取弹簧测力计的示数,先观察弹簧测力计的刻度确定分度值,图中指针指向2N刻度位置,直接得到竖直拉动时的拉力大小。接下来分析斜向拉动的情况:首先明确力臂的定义是支点到力的作用线的垂直距离,当弹簧测力计倾斜拉动时,动力对应的力臂不再等于杠杆上标注的10cm长度,会比竖直拉动时的力臂更短;此时左侧钩码的总重力作为阻力、阻力臂也没有发生变化,结合杠杆平衡条件F₁L₁=F₂L₂,就可以推导得出动力的变化趋势。
【解析】
1. 读取弹簧测力计示数:观察图中弹簧测力计的放大刻度,1N到2N之间有5个小格,分度值为0.2N,指针恰好对齐2N刻度线,因此竖直向下拉时弹簧测力计的示数为2N。
2. 分析斜拉的示数变化:当弹簧测力计沿图中虚线方向斜向下拉时,支点到拉力作用线的垂直距离(也就是动力臂)会小于竖直拉动时的动力臂,即动力臂变小;此时阻力(钩码总重力)和阻力臂都保持不变,根据杠杆平衡条件F₁L₁=F₂L₂,在阻力、阻力臂不变的前提下,动力臂减小,对应的动力也就是弹簧测力计的拉力就会变大,因此弹簧测力计示数会变大。
【答案】
2;变大;动力臂变小,阻力和阻力臂不变,则动力即拉力会变大
【知识点】
弹簧测力计读数;杠杆平衡条件
【点评】
本题是杠杆相关的基础经典考题,核心考察对力臂概念的理解和杠杆平衡条件的应用,易错点是部分同学会误以为斜拉时力臂仍然等于杠杆上的刻度长度,通过本题可以加深对“力臂是支点到力的作用线的垂直距离”这一概念的认知,巩固杠杆平衡条件的实际应用。
【难度系数】
0.8
首先第一步先读取弹簧测力计的示数,先观察弹簧测力计的刻度确定分度值,图中指针指向2N刻度位置,直接得到竖直拉动时的拉力大小。接下来分析斜向拉动的情况:首先明确力臂的定义是支点到力的作用线的垂直距离,当弹簧测力计倾斜拉动时,动力对应的力臂不再等于杠杆上标注的10cm长度,会比竖直拉动时的力臂更短;此时左侧钩码的总重力作为阻力、阻力臂也没有发生变化,结合杠杆平衡条件F₁L₁=F₂L₂,就可以推导得出动力的变化趋势。
【解析】
1. 读取弹簧测力计示数:观察图中弹簧测力计的放大刻度,1N到2N之间有5个小格,分度值为0.2N,指针恰好对齐2N刻度线,因此竖直向下拉时弹簧测力计的示数为2N。
2. 分析斜拉的示数变化:当弹簧测力计沿图中虚线方向斜向下拉时,支点到拉力作用线的垂直距离(也就是动力臂)会小于竖直拉动时的动力臂,即动力臂变小;此时阻力(钩码总重力)和阻力臂都保持不变,根据杠杆平衡条件F₁L₁=F₂L₂,在阻力、阻力臂不变的前提下,动力臂减小,对应的动力也就是弹簧测力计的拉力就会变大,因此弹簧测力计示数会变大。
【答案】
2;变大;动力臂变小,阻力和阻力臂不变,则动力即拉力会变大
【知识点】
弹簧测力计读数;杠杆平衡条件
【点评】
本题是杠杆相关的基础经典考题,核心考察对力臂概念的理解和杠杆平衡条件的应用,易错点是部分同学会误以为斜拉时力臂仍然等于杠杆上的刻度长度,通过本题可以加深对“力臂是支点到力的作用线的垂直距离”这一概念的认知,巩固杠杆平衡条件的实际应用。
【难度系数】
0.8
3 [2024 镇江]小明用如图所示装置探究杠杆平衡条件,实验中杠杆始终保持水平平衡。此时弹簧测力计处于竖直方向,他发现弹簧测力计示数稍稍超过量程。为了完成实验,下列方案可行的是 (
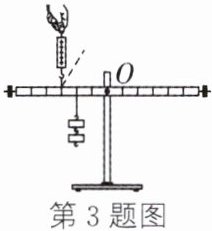
A.钩码的数量适当增加
B.钩码的位置适当左移
C.弹簧测力计转到图中虚线位置
D.弹簧测力计位置适当向左平移
D
)A.钩码的数量适当增加
B.钩码的位置适当左移
C.弹簧测力计转到图中虚线位置
D.弹簧测力计位置适当向左平移
答案:3. D
解析:
【分析】
我们首先明确解题目标:当前弹簧测力计拉力超出量程,需要在杠杆保持水平平衡的前提下,让弹簧测力计的拉力减小。结合杠杆平衡条件$ F_1L_1=F_2L_2 $可知,要减小动力$ F_1 $,可通过三种方式实现:减小阻力$ F_2 $、减小阻力臂$ L_2 $、增大动力臂$ L_1 $。接下来逐一分析每个选项的操作对三个物理量的影响,判断是否能让动力$ F_1 $减小,即可选出可行方案。
【解析】
根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $,当前弹簧测力计示数超过量程,说明动力$ F_1 $过大,需要减小$ F_1 $:
选项A:钩码数量适当增加,会让阻力$ F_2 $增大,其余条件不变时,动力$ F_1 $会进一步变大,超出量程更多,方案不可行。
选项B:钩码位置适当左移,阻力臂$ L_2 $会变大,其余条件不变时,动力$ F_1 $会变大,不符合要求,方案不可行。
选项C:弹簧测力计转到图中虚线位置,拉力不再竖直向上,动力臂$ L_1 $会变小,其余条件不变时,动力$ F_1 $会变大,更超出量程,方案不可行。
选项D:弹簧测力计位置适当向左平移,拉力仍保持竖直向上,动力臂$ L_1 $会增大,阻力$ F_2 $和阻力臂$ L_2 $均不变,因此动力$ F_1 $会减小,可落到弹簧测力计量程内,方案可行。
综上选D。
【答案】
D
【知识点】
杠杆平衡条件,力臂的判断
【点评】
本题是杠杆平衡条件的应用型题目,核心考查对杠杆平衡公式的灵活运用,易错点是误认为斜向拉弹簧测力计可以省力,实际上斜拉会使动力臂小于对应格数的长度,拉力反而变大。解题时紧扣“减小拉力”的目标,逐一分析操作对各物理量的影响即可快速判断。
【难度系数】
0.7
我们首先明确解题目标:当前弹簧测力计拉力超出量程,需要在杠杆保持水平平衡的前提下,让弹簧测力计的拉力减小。结合杠杆平衡条件$ F_1L_1=F_2L_2 $可知,要减小动力$ F_1 $,可通过三种方式实现:减小阻力$ F_2 $、减小阻力臂$ L_2 $、增大动力臂$ L_1 $。接下来逐一分析每个选项的操作对三个物理量的影响,判断是否能让动力$ F_1 $减小,即可选出可行方案。
【解析】
根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $,当前弹簧测力计示数超过量程,说明动力$ F_1 $过大,需要减小$ F_1 $:
选项A:钩码数量适当增加,会让阻力$ F_2 $增大,其余条件不变时,动力$ F_1 $会进一步变大,超出量程更多,方案不可行。
选项B:钩码位置适当左移,阻力臂$ L_2 $会变大,其余条件不变时,动力$ F_1 $会变大,不符合要求,方案不可行。
选项C:弹簧测力计转到图中虚线位置,拉力不再竖直向上,动力臂$ L_1 $会变小,其余条件不变时,动力$ F_1 $会变大,更超出量程,方案不可行。
选项D:弹簧测力计位置适当向左平移,拉力仍保持竖直向上,动力臂$ L_1 $会增大,阻力$ F_2 $和阻力臂$ L_2 $均不变,因此动力$ F_1 $会减小,可落到弹簧测力计量程内,方案可行。
综上选D。
【答案】
D
【知识点】
杠杆平衡条件,力臂的判断
【点评】
本题是杠杆平衡条件的应用型题目,核心考查对杠杆平衡公式的灵活运用,易错点是误认为斜向拉弹簧测力计可以省力,实际上斜拉会使动力臂小于对应格数的长度,拉力反而变大。解题时紧扣“减小拉力”的目标,逐一分析操作对各物理量的影响即可快速判断。
【难度系数】
0.7
4 新情境 文化遗产 杆秤是我国传统的一种称量工具,凝聚着我国人民的智慧。如图所示,O 为杆秤提纽,$OA=8\ \mathrm{cm}$,秤砣质量$m=0.2\ \mathrm{kg}$,不挂重物和秤砣时,手提提纽,杆秤可水平平衡。用它称鱼,当秤砣置于 B 点时,杆秤再次水平平衡,此时测得$OB=32\ \mathrm{cm}$,则鱼的质量为(
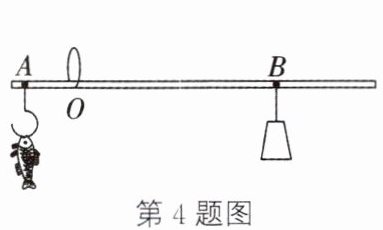
A.1.0 kg
B.0.8 kg
C.0.6 kg
D.0.4 kg
B
)A.1.0 kg
B.0.8 kg
C.0.6 kg
D.0.4 kg
答案:4. B
解析:
【分析】
这道题是杠杆平衡条件的实际应用题,题干已经说明不挂重物和秤砣时,手提提纽杆秤就可水平平衡,说明杆秤自身重力的力矩已经自行抵消,不需要额外考虑杆自重的影响。我们可以将鱼对杆秤的拉力作为左侧动力,对应力臂为OA;秤砣对杆秤的拉力作为右侧阻力,对应力臂为OB。根据杠杆平衡条件“动力×动力臂=阻力×阻力臂”,两个拉力大小分别等于鱼和秤砣的重力,代入重力公式G=mg后两边的重力加速度g可以直接约去,得到鱼的质量与OA的乘积等于秤砣质量与OB的乘积,代入已知数值就能算出鱼的质量。
【解析】
已知杆秤空载时已实现水平平衡,无需考虑杆秤自身重力的影响,根据杠杆平衡条件:
$F_1L_1=F_2L_2$
其中左侧拉力等于鱼的重力$G_{\mathrm{鱼}}=m_{\mathrm{鱼}}g$,对应力臂$L_1=OA=8\ \mathrm{cm}$;
右侧拉力等于秤砣的重力$G_{\mathrm{砣}}=m_{\mathrm{砣}}g$,对应力臂$L_2=OB=32\ \mathrm{cm}$。
将上述关系代入杠杆平衡公式可得:
$m_{\mathrm{鱼}}g · OA = m_{\mathrm{砣}}g · OB$
两边消去重力加速度g,整理得到质量的计算式:
$m_{\mathrm{鱼}} = \frac{m_{\mathrm{砣}} · OB}{OA}$
代入已知数值$m_{\mathrm{砣}}=0.2\ \mathrm{kg}$,$OB=32\ \mathrm{cm}$,$OA=8\ \mathrm{cm}$:
$m_{\mathrm{鱼}}=\frac{0.2\ \mathrm{kg} × 32\ \mathrm{cm}}{8\ \mathrm{cm}}=0.8\ \mathrm{kg}$
因此本题选B。
【答案】
B
【知识点】
杠杆平衡条件,杠杆的应用
【点评】
本题结合我国传统杆秤的文化遗产情境命题,属于杠杆模块的基础题型,题干主动规避了杆自重的干扰项,学生只要牢记杠杆平衡核心公式,找准对应的力臂代入计算即可得到结果,主要考察学生对杠杆平衡规律的基础掌握程度。
【难度系数】
0.8
这道题是杠杆平衡条件的实际应用题,题干已经说明不挂重物和秤砣时,手提提纽杆秤就可水平平衡,说明杆秤自身重力的力矩已经自行抵消,不需要额外考虑杆自重的影响。我们可以将鱼对杆秤的拉力作为左侧动力,对应力臂为OA;秤砣对杆秤的拉力作为右侧阻力,对应力臂为OB。根据杠杆平衡条件“动力×动力臂=阻力×阻力臂”,两个拉力大小分别等于鱼和秤砣的重力,代入重力公式G=mg后两边的重力加速度g可以直接约去,得到鱼的质量与OA的乘积等于秤砣质量与OB的乘积,代入已知数值就能算出鱼的质量。
【解析】
已知杆秤空载时已实现水平平衡,无需考虑杆秤自身重力的影响,根据杠杆平衡条件:
$F_1L_1=F_2L_2$
其中左侧拉力等于鱼的重力$G_{\mathrm{鱼}}=m_{\mathrm{鱼}}g$,对应力臂$L_1=OA=8\ \mathrm{cm}$;
右侧拉力等于秤砣的重力$G_{\mathrm{砣}}=m_{\mathrm{砣}}g$,对应力臂$L_2=OB=32\ \mathrm{cm}$。
将上述关系代入杠杆平衡公式可得:
$m_{\mathrm{鱼}}g · OA = m_{\mathrm{砣}}g · OB$
两边消去重力加速度g,整理得到质量的计算式:
$m_{\mathrm{鱼}} = \frac{m_{\mathrm{砣}} · OB}{OA}$
代入已知数值$m_{\mathrm{砣}}=0.2\ \mathrm{kg}$,$OB=32\ \mathrm{cm}$,$OA=8\ \mathrm{cm}$:
$m_{\mathrm{鱼}}=\frac{0.2\ \mathrm{kg} × 32\ \mathrm{cm}}{8\ \mathrm{cm}}=0.8\ \mathrm{kg}$
因此本题选B。
【答案】
B
【知识点】
杠杆平衡条件,杠杆的应用
【点评】
本题结合我国传统杆秤的文化遗产情境命题,属于杠杆模块的基础题型,题干主动规避了杆自重的干扰项,学生只要牢记杠杆平衡核心公式,找准对应的力臂代入计算即可得到结果,主要考察学生对杠杆平衡规律的基础掌握程度。
【难度系数】
0.8
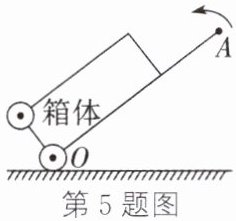
5 如图所示,$O$为拉杆式旅行箱的轮轴,$OA$为拉杆。现在拉杆端点$A$处施加一竖直向上的力$F$,使箱体从图示位置绕$O$点缓慢逆时针转至接近竖直位置,则力$F$的大小(
A.一直变大
B.始终不变
C.一直变小
D.先变小后变大
B
)A.一直变大
B.始终不变
C.一直变小
D.先变小后变大
答案:5. B
解析:
【分析】
这是一道动态杠杆平衡问题,解题思路如下:首先明确杠杆的支点为O,确定动力是A点竖直向上的拉力F,阻力是箱体自身的重力G,重力大小恒定、方向始终竖直向下。接下来我们不需要单独分析两个力臂各自的变化,而是结合两个力都沿竖直方向的特点,推导动力臂和阻力臂的比值变化规律,最后代入杠杆平衡条件就能直接判断F的大小变化,避免复杂的分步计算。
【解析】
设箱体重力为G,动力F对应的力臂为$L_F$,阻力G对应的力臂为$L_G$:
1. 根据杠杆平衡条件可得:$F · L_F = G · L_G$,变形得到$F = G · \frac{L_G}{L_F}$。
2. 由于F和G始终沿竖直方向,二者的作用线互相平行,力臂$L_F$是支点O到F作用线的水平距离,$L_G$是支点O到重力作用线的水平距离。设OA连线与水平方向夹角为$θ$,A点到O点的长度为$OA$,箱体重心到O点的距离为$OC$,则$L_F = OA · \cosθ$,$L_G = OC · \cosθ$,两式中的$\cosθ$可以约去,得到$\frac{L_G}{L_F}=\frac{OC}{OA}$,这个比值由箱体、拉杆的固定几何结构决定,在箱体绕O逆时针转动的全过程中始终保持不变。
3. 因为G大小恒定,$\frac{L_G}{L_F}$为定值,因此F的大小始终不变。
【答案】B
【知识点】杠杆平衡条件,力臂计算
【点评】本题属于动态杠杆的易错题,很多同学会错误认为两个力臂的变化幅度不同,忽略了动力和阻力同为竖直方向时,力臂的比值由结构固定、和转动角度无关的特点,重点考察了对杠杆平衡条件的灵活应用能力。
【难度系数】0.3
这是一道动态杠杆平衡问题,解题思路如下:首先明确杠杆的支点为O,确定动力是A点竖直向上的拉力F,阻力是箱体自身的重力G,重力大小恒定、方向始终竖直向下。接下来我们不需要单独分析两个力臂各自的变化,而是结合两个力都沿竖直方向的特点,推导动力臂和阻力臂的比值变化规律,最后代入杠杆平衡条件就能直接判断F的大小变化,避免复杂的分步计算。
【解析】
设箱体重力为G,动力F对应的力臂为$L_F$,阻力G对应的力臂为$L_G$:
1. 根据杠杆平衡条件可得:$F · L_F = G · L_G$,变形得到$F = G · \frac{L_G}{L_F}$。
2. 由于F和G始终沿竖直方向,二者的作用线互相平行,力臂$L_F$是支点O到F作用线的水平距离,$L_G$是支点O到重力作用线的水平距离。设OA连线与水平方向夹角为$θ$,A点到O点的长度为$OA$,箱体重心到O点的距离为$OC$,则$L_F = OA · \cosθ$,$L_G = OC · \cosθ$,两式中的$\cosθ$可以约去,得到$\frac{L_G}{L_F}=\frac{OC}{OA}$,这个比值由箱体、拉杆的固定几何结构决定,在箱体绕O逆时针转动的全过程中始终保持不变。
3. 因为G大小恒定,$\frac{L_G}{L_F}$为定值,因此F的大小始终不变。
【答案】B
【知识点】杠杆平衡条件,力臂计算
【点评】本题属于动态杠杆的易错题,很多同学会错误认为两个力臂的变化幅度不同,忽略了动力和阻力同为竖直方向时,力臂的比值由结构固定、和转动角度无关的特点,重点考察了对杠杆平衡条件的灵活应用能力。
【难度系数】0.3