1 关于杠杆的平衡,下列说法正确的是
(
A.只有静止不动的杠杆才是平衡的
B.杠杆的平衡条件也称为杠杆原理
C.牛顿最早总结出杠杆的平衡条件
D.杠杆平衡时,动力与阻力是一对平衡力
(
B
)A.只有静止不动的杠杆才是平衡的
B.杠杆的平衡条件也称为杠杆原理
C.牛顿最早总结出杠杆的平衡条件
D.杠杆平衡时,动力与阻力是一对平衡力
答案:1. B
解析:
【分析】
这是一道杠杆平衡相关的概念辨析题,我们可以通过逐个对照对应物理概念逐一排除错误选项完成解题:第一步先回忆杠杆平衡的完整定义,判断A选项的正误;第二步回忆杠杆平衡条件的相关别称判断B选项;第三步回忆杠杆平衡条件的发现历史判断C选项;第四步结合平衡力的成立条件,判断动力和阻力是否属于平衡力,最终选出正确答案。
【解析】
我们逐个对选项进行分析:
1. 选项A:杠杆的平衡状态包含两种情况,分别是杠杆静止不动、杠杆匀速缓慢转动,并非只有静止的杠杆才处于平衡状态,因此A说法错误。
2. 选项B:杠杆的平衡条件内容为“动力×动力臂=阻力×阻力臂”,该规律也被称为杠杆原理,B说法正确。
3. 选项C:最早总结出杠杆平衡条件的学者是古希腊物理学家阿基米德,并非牛顿,因此C说法错误。
4. 选项D:一对平衡力需要同时满足“作用在同一物体上、大小相等、方向相反、作用在同一直线”四个条件,杠杆平衡时动力和阻力的方向往往不相反,大小也不一定相等,不满足平衡力的全部要求,不属于一对平衡力,因此D说法错误。
【答案】
B
【知识点】
杠杆平衡定义;杠杆原理;平衡力判定
【点评】
本题属于杠杆章节的基础概念辨析题,考查的都是易混淆的细节知识点,不少同学会误以为杠杆平衡只有静止状态,或是记错杠杆原理的发现者,学习时要准确记忆物理概念的全部内涵,避免不同概念之间的混淆。
【难度系数】
0.8
这是一道杠杆平衡相关的概念辨析题,我们可以通过逐个对照对应物理概念逐一排除错误选项完成解题:第一步先回忆杠杆平衡的完整定义,判断A选项的正误;第二步回忆杠杆平衡条件的相关别称判断B选项;第三步回忆杠杆平衡条件的发现历史判断C选项;第四步结合平衡力的成立条件,判断动力和阻力是否属于平衡力,最终选出正确答案。
【解析】
我们逐个对选项进行分析:
1. 选项A:杠杆的平衡状态包含两种情况,分别是杠杆静止不动、杠杆匀速缓慢转动,并非只有静止的杠杆才处于平衡状态,因此A说法错误。
2. 选项B:杠杆的平衡条件内容为“动力×动力臂=阻力×阻力臂”,该规律也被称为杠杆原理,B说法正确。
3. 选项C:最早总结出杠杆平衡条件的学者是古希腊物理学家阿基米德,并非牛顿,因此C说法错误。
4. 选项D:一对平衡力需要同时满足“作用在同一物体上、大小相等、方向相反、作用在同一直线”四个条件,杠杆平衡时动力和阻力的方向往往不相反,大小也不一定相等,不满足平衡力的全部要求,不属于一对平衡力,因此D说法错误。
【答案】
B
【知识点】
杠杆平衡定义;杠杆原理;平衡力判定
【点评】
本题属于杠杆章节的基础概念辨析题,考查的都是易混淆的细节知识点,不少同学会误以为杠杆平衡只有静止状态,或是记错杠杆原理的发现者,学习时要准确记忆物理概念的全部内涵,避免不同概念之间的混淆。
【难度系数】
0.8
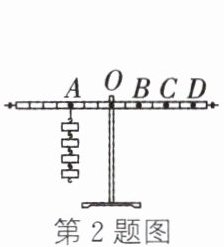
2 小明探究杠杆的平衡条件,挂钩码前,调节杠杆在水平位置平衡,杠杆上每格距离相等,杠杆上A、B、C、D的位置如图所示,当在A点挂4个钩码时,下列操作中能使杠杆在水平位置平衡的是(每个钩码的质量完全相同)(
A.在B点挂5个钩码
B.在C点挂4个钩码
C.在D点挂1个钩码
D.在D点挂2个钩码
D
)A.在B点挂5个钩码
B.在C点挂4个钩码
C.在D点挂1个钩码
D.在D点挂2个钩码
答案:2. D
解析:
【分析】
这道题的核心是利用杠杆平衡条件判断杠杆能否平衡,我们可以先做简化设定:设每个钩码重力为G,杠杆每一格的长度为L,首先计算支点左侧A点的力与力臂的乘积,再逐一验证每个选项右侧的力和对应力臂的乘积,只要满足两侧力×力臂相等,就可以让杠杆在水平位置平衡。
【解析】
解:设每个钩码的重力为G,杠杆每格的长度为L。
由题图可得,支点O左侧A点的力臂$L_A=3L$,左侧悬挂4个钩码,总拉力$F_A=4G$,因此左侧力与力臂的乘积为:
$F_A × L_A = 4G × 3L = 12GL$
根据杠杆平衡条件$F_1L_1=F_2L_2$,要使杠杆水平平衡,右侧力与力臂的总乘积也需要等于12GL,逐一验证选项:
1. 选项A:B点的力臂$L_B=2L$,挂5个钩码时右侧乘积为$5G × 2L=10GL ≠ 12GL$,杠杆不平衡;
2. 选项B:C点的力臂$L_C=4L$,挂4个钩码时右侧乘积为$4G × 4L=16GL ≠ 12GL$,杠杆不平衡;
3. 选项C:D点的力臂$L_D=6L$,挂1个钩码时右侧乘积为$1G × 6L=6GL ≠ 12GL$,杠杆不平衡;
4. 选项D:D点的力臂$L_D=6L$,挂2个钩码时右侧乘积为$2G × 6L=12GL$,和左侧乘积相等,杠杆可以在水平位置平衡。
【答案】D
【知识点】杠杆平衡条件
【点评】本题是杠杆平衡规律的基础应用题,解题关键是准确数出各点对应的力臂格数,通过设定单位钩码重力、单位格长度代入公式即可快速计算,不需要额外换算单位,适合巩固杠杆平衡的核心逻辑。
【难度系数】0.8
这道题的核心是利用杠杆平衡条件判断杠杆能否平衡,我们可以先做简化设定:设每个钩码重力为G,杠杆每一格的长度为L,首先计算支点左侧A点的力与力臂的乘积,再逐一验证每个选项右侧的力和对应力臂的乘积,只要满足两侧力×力臂相等,就可以让杠杆在水平位置平衡。
【解析】
解:设每个钩码的重力为G,杠杆每格的长度为L。
由题图可得,支点O左侧A点的力臂$L_A=3L$,左侧悬挂4个钩码,总拉力$F_A=4G$,因此左侧力与力臂的乘积为:
$F_A × L_A = 4G × 3L = 12GL$
根据杠杆平衡条件$F_1L_1=F_2L_2$,要使杠杆水平平衡,右侧力与力臂的总乘积也需要等于12GL,逐一验证选项:
1. 选项A:B点的力臂$L_B=2L$,挂5个钩码时右侧乘积为$5G × 2L=10GL ≠ 12GL$,杠杆不平衡;
2. 选项B:C点的力臂$L_C=4L$,挂4个钩码时右侧乘积为$4G × 4L=16GL ≠ 12GL$,杠杆不平衡;
3. 选项C:D点的力臂$L_D=6L$,挂1个钩码时右侧乘积为$1G × 6L=6GL ≠ 12GL$,杠杆不平衡;
4. 选项D:D点的力臂$L_D=6L$,挂2个钩码时右侧乘积为$2G × 6L=12GL$,和左侧乘积相等,杠杆可以在水平位置平衡。
【答案】D
【知识点】杠杆平衡条件
【点评】本题是杠杆平衡规律的基础应用题,解题关键是准确数出各点对应的力臂格数,通过设定单位钩码重力、单位格长度代入公式即可快速计算,不需要额外换算单位,适合巩固杠杆平衡的核心逻辑。
【难度系数】0.8
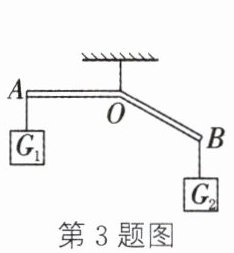
3 如图所示,杠杆 AOB 用细线悬挂起来,此时 AO 恰好处于水平位置,$AO=BO$,不计杠杆自身重力,在 A、B 两点同时挂上质量均为 m 的重物$G_1$和$G_2$时,下列选项正确的是(
A.A 端下沉
B.B 端下沉
C.保持不变
D.无法判断
A
)A.A 端下沉
B.B 端下沉
C.保持不变
D.无法判断
答案:3. A
解析:
【分析】
这道题的核心是利用杠杆平衡条件判断杠杆的偏转方向,解题思路如下:首先明确支点为O,两个重物质量相等,因此两端拉力大小相等;接下来分别确定两个拉力对应的力臂,要牢记力臂是支点到力的作用线的垂直距离,而非支点到作用点的连线长度:A端拉力竖直向下,AO恰好水平,因此G₁的力臂就等于AO的长度;B端OB是倾斜的,竖直向下的G₂的力臂是支点O到G₂拉力作用线的垂线段,长度必然小于OB本身。结合已知AO=BO,就能得到G₁的力臂大于G₂的力臂,最后比较两侧力和力臂的乘积,乘积更大的一侧杠杆会下沉,即可得到结论。
【解析】
1. 不计杠杆自身重力,两个重物质量均为m,因此两端拉力满足:$G_1=G_2=mg$,两侧拉力大小相等。
2. 确定力臂大小:AO处于水平位置,G₁的拉力竖直向下,拉力方向与AO垂直,因此G₁的力臂$L_1=AO$;G₂的拉力竖直向下,OB为倾斜线段,从O点向G₂的拉力作用线作垂线,得到G₂的力臂$L_2$,由几何关系可知垂线段(直角边)长度小于斜边OB,即$L_2<OB$。
3. 已知$AO=BO$,因此可得$L_1=AO=BO>L_2$。
4. 比较两侧力矩:左侧$G_1L_1$,右侧$G_2L_2$,由于$G_1=G_2$、$L_1>L_2$,因此$G_1L_1>G_2L_2$,A端的力矩更大,杠杆A端下沉。
因此选项A正确。
【答案】A
【知识点】
杠杆平衡条件,力臂的判断
【点评】
本题的易错点是很多同学会直接把AO、OB的长度当作两个力的力臂,误以为AO=BO就会杠杆平衡,错选C。要特别注意:只有当拉力方向和支点到作用点的连线垂直时,支点到作用点的线段长度才等于力臂,本题B端拉力竖直向下,OB倾斜,因此OB不是G₂的力臂,这是解题的核心突破口。
【难度系数】
0.6
这道题的核心是利用杠杆平衡条件判断杠杆的偏转方向,解题思路如下:首先明确支点为O,两个重物质量相等,因此两端拉力大小相等;接下来分别确定两个拉力对应的力臂,要牢记力臂是支点到力的作用线的垂直距离,而非支点到作用点的连线长度:A端拉力竖直向下,AO恰好水平,因此G₁的力臂就等于AO的长度;B端OB是倾斜的,竖直向下的G₂的力臂是支点O到G₂拉力作用线的垂线段,长度必然小于OB本身。结合已知AO=BO,就能得到G₁的力臂大于G₂的力臂,最后比较两侧力和力臂的乘积,乘积更大的一侧杠杆会下沉,即可得到结论。
【解析】
1. 不计杠杆自身重力,两个重物质量均为m,因此两端拉力满足:$G_1=G_2=mg$,两侧拉力大小相等。
2. 确定力臂大小:AO处于水平位置,G₁的拉力竖直向下,拉力方向与AO垂直,因此G₁的力臂$L_1=AO$;G₂的拉力竖直向下,OB为倾斜线段,从O点向G₂的拉力作用线作垂线,得到G₂的力臂$L_2$,由几何关系可知垂线段(直角边)长度小于斜边OB,即$L_2<OB$。
3. 已知$AO=BO$,因此可得$L_1=AO=BO>L_2$。
4. 比较两侧力矩:左侧$G_1L_1$,右侧$G_2L_2$,由于$G_1=G_2$、$L_1>L_2$,因此$G_1L_1>G_2L_2$,A端的力矩更大,杠杆A端下沉。
因此选项A正确。
【答案】A
【知识点】
杠杆平衡条件,力臂的判断
【点评】
本题的易错点是很多同学会直接把AO、OB的长度当作两个力的力臂,误以为AO=BO就会杠杆平衡,错选C。要特别注意:只有当拉力方向和支点到作用点的连线垂直时,支点到作用点的线段长度才等于力臂,本题B端拉力竖直向下,OB倾斜,因此OB不是G₂的力臂,这是解题的核心突破口。
【难度系数】
0.6
4 若杠杆的动力臂是阻力臂的5倍,则杠杆平衡时,动力是阻力的
$\dfrac{1}{5}$
。若作用在杠杆上的动力是80 N,动力臂是40 cm,阻力臂是10 cm,则杠杆平衡时,阻力是320
N。答案:4. $\dfrac{1}{5}$ 320
解析:
【分析】
这道题的核心解题依据是杠杆平衡条件,首先我们先回忆杠杆平衡的核心公式:动力×动力臂=阻力×阻力臂,也就是$F_1L_1=F_2L_2$。第一问已知动力臂是阻力臂的5倍,我们可以把臂长的倍数关系代入平衡公式,变形后就能直接得到动力和阻力的比值;第二问直接把给出的动力、动力臂、阻力臂的已知数值代入变形后的阻力计算公式即可算出结果,这里三个长度单位都是厘米,比值计算时单位会自动消去,不需要额外转换为国际单位米,简化计算。
【解析】
根据杠杆平衡条件$F_1L_1=F_2L_2$分步计算:
1. 求解第一空:
已知动力臂$L_1=5L_2$,对平衡公式做变形可得:
$\frac{F_1}{F_2}=\frac{L_2}{L_1}=\frac{L_2}{5L_2}=\frac{1}{5}$,即动力是阻力的$\frac{1}{5}$。
2. 求解第二空:
将已知条件$F_1=80\ \mathrm{N}$、$L_1=40\ \mathrm{cm}$、$L_2=10\ \mathrm{cm}$代入变形后的阻力公式:
$F_2=\frac{F_1L_1}{L_2}=\frac{80\ \mathrm{N} × 40\ \mathrm{cm}}{10\ \mathrm{cm}}=320\ \mathrm{N}$
【答案】
$\dfrac{1}{5}$;320
【知识点】
杠杆平衡条件
【点评】
本题属于杠杆平衡条件的基础应用题,没有复杂的场景变形和受力分析,只要牢记杠杆平衡公式、掌握公式的基本变形方法就能顺利求解,计算时注意臂长单位统一即可,不需要额外做单位换算,避免低级计算错误。
【难度系数】
0.9
这道题的核心解题依据是杠杆平衡条件,首先我们先回忆杠杆平衡的核心公式:动力×动力臂=阻力×阻力臂,也就是$F_1L_1=F_2L_2$。第一问已知动力臂是阻力臂的5倍,我们可以把臂长的倍数关系代入平衡公式,变形后就能直接得到动力和阻力的比值;第二问直接把给出的动力、动力臂、阻力臂的已知数值代入变形后的阻力计算公式即可算出结果,这里三个长度单位都是厘米,比值计算时单位会自动消去,不需要额外转换为国际单位米,简化计算。
【解析】
根据杠杆平衡条件$F_1L_1=F_2L_2$分步计算:
1. 求解第一空:
已知动力臂$L_1=5L_2$,对平衡公式做变形可得:
$\frac{F_1}{F_2}=\frac{L_2}{L_1}=\frac{L_2}{5L_2}=\frac{1}{5}$,即动力是阻力的$\frac{1}{5}$。
2. 求解第二空:
将已知条件$F_1=80\ \mathrm{N}$、$L_1=40\ \mathrm{cm}$、$L_2=10\ \mathrm{cm}$代入变形后的阻力公式:
$F_2=\frac{F_1L_1}{L_2}=\frac{80\ \mathrm{N} × 40\ \mathrm{cm}}{10\ \mathrm{cm}}=320\ \mathrm{N}$
【答案】
$\dfrac{1}{5}$;320
【知识点】
杠杆平衡条件
【点评】
本题属于杠杆平衡条件的基础应用题,没有复杂的场景变形和受力分析,只要牢记杠杆平衡公式、掌握公式的基本变形方法就能顺利求解,计算时注意臂长单位统一即可,不需要额外做单位换算,避免低级计算错误。
【难度系数】
0.9
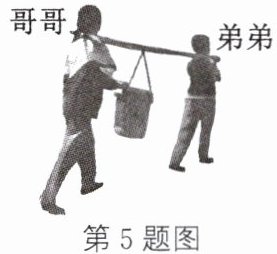
5 新情境 生活实践 [2025 扬州]如图所示是兄弟二人抬水的场景,扁担相当于杠杆,若以哥哥的肩为支点,弟弟对扁担的作用力是动力,哥哥将水桶悬挂点向自己移动一段距离,则动力臂
不变
,阻力臂变小
,弟弟对扁担的作用力变小
。(填变化情况)答案:5. 不变 变小 变小
解析:
【分析】
首先明确题目给定的前提:支点是哥哥的肩膀,弟弟对扁担的作用力为动力。第一步先判断动力臂的变化:动力臂是支点到动力作用线的垂直距离,移动水桶的过程中哥哥的肩、弟弟的手位置都没有改变,因此这段距离不会发生变化。第二步判断阻力臂的变化:阻力是水桶的重力,阻力臂是支点到水桶重力作用线的垂直距离,将水桶向哥哥移动时,悬挂点向支点靠近,这段距离就会变小。第三步结合杠杆平衡条件推导动力大小:杠杆平衡时动力×动力臂=阻力×阻力臂,水桶重力也就是阻力大小不变,动力臂不变、阻力臂变小,因此动力也会随之变小。
【解析】
1. 动力臂变化判断:以哥哥的肩为支点,弟弟对扁担的动力竖直向上,动力臂是支点到弟弟动力作用线的垂直距离,移动水桶过程中哥哥的肩、弟弟的手位置均未改变,因此动力臂不变。
2. 阻力臂变化判断:阻力为水桶的重力,方向竖直向下,阻力臂是支点到水桶重力作用线的垂直距离,水桶悬挂点向哥哥移动时,悬挂点靠近支点,因此阻力臂变小。
3. 动力大小推导:根据杠杆平衡条件$F_1L_1=F_2L_2$,其中阻力$F_2$等于水桶重力,大小保持不变,动力臂$L_1$不变,阻力臂$L_2$减小,代入公式可得$F_1=\frac{F_2L_2}{L_1}$,因此弟弟对扁担的作用力$F_1$变小。
【答案】
不变 变小 变小
【知识点】
杠杆力臂判断,杠杆平衡条件
【点评】
本题结合生活抬水的真实场景考察杠杆的实际应用,解题核心是紧扣力臂的定义,先明确支点位置再逐一判断力臂的变化,再代入平衡公式推导力的大小,避免凭直觉误判动力臂的变化。
【难度系数】
0.7
首先明确题目给定的前提:支点是哥哥的肩膀,弟弟对扁担的作用力为动力。第一步先判断动力臂的变化:动力臂是支点到动力作用线的垂直距离,移动水桶的过程中哥哥的肩、弟弟的手位置都没有改变,因此这段距离不会发生变化。第二步判断阻力臂的变化:阻力是水桶的重力,阻力臂是支点到水桶重力作用线的垂直距离,将水桶向哥哥移动时,悬挂点向支点靠近,这段距离就会变小。第三步结合杠杆平衡条件推导动力大小:杠杆平衡时动力×动力臂=阻力×阻力臂,水桶重力也就是阻力大小不变,动力臂不变、阻力臂变小,因此动力也会随之变小。
【解析】
1. 动力臂变化判断:以哥哥的肩为支点,弟弟对扁担的动力竖直向上,动力臂是支点到弟弟动力作用线的垂直距离,移动水桶过程中哥哥的肩、弟弟的手位置均未改变,因此动力臂不变。
2. 阻力臂变化判断:阻力为水桶的重力,方向竖直向下,阻力臂是支点到水桶重力作用线的垂直距离,水桶悬挂点向哥哥移动时,悬挂点靠近支点,因此阻力臂变小。
3. 动力大小推导:根据杠杆平衡条件$F_1L_1=F_2L_2$,其中阻力$F_2$等于水桶重力,大小保持不变,动力臂$L_1$不变,阻力臂$L_2$减小,代入公式可得$F_1=\frac{F_2L_2}{L_1}$,因此弟弟对扁担的作用力$F_1$变小。
【答案】
不变 变小 变小
【知识点】
杠杆力臂判断,杠杆平衡条件
【点评】
本题结合生活抬水的真实场景考察杠杆的实际应用,解题核心是紧扣力臂的定义,先明确支点位置再逐一判断力臂的变化,再代入平衡公式推导力的大小,避免凭直觉误判动力臂的变化。
【难度系数】
0.7
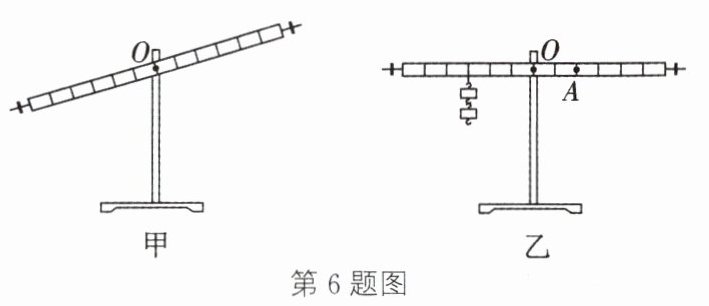
6 小明做“探究杠杆的平衡条件”实验:
(1)安装好杠杆,如图甲所示杠杆静止,此时杠杆处于
(2)如图乙所示,在杠杆左侧挂2个钩码,每个钩码的质量均为50 g,为了便于在杠杆上直接读出力臂的大小,在A点沿
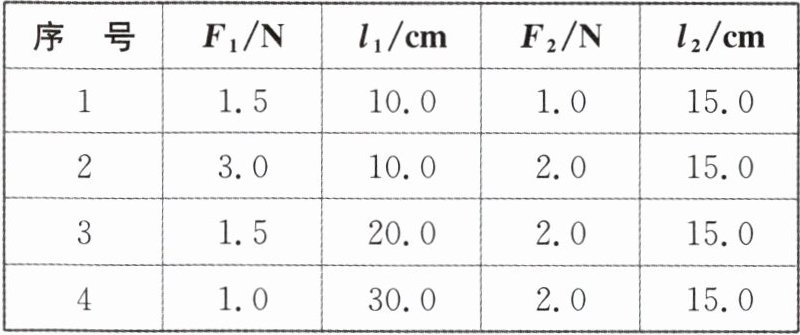
(3)接下来,小明又进行了三次实验,将实验数据填在表中,最后总结得出规律。每次实验总是在前一次基础上改变$F_{2}$、$l_{1}$、$l_{2}$中的一个物理量。小明分析数据后发现,第
(1)安装好杠杆,如图甲所示杠杆静止,此时杠杆处于
平衡
状态;为使杠杆在水平位置平衡,应适当向右
调节杠杆两端的平衡螺母。(2)如图乙所示,在杠杆左侧挂2个钩码,每个钩码的质量均为50 g,为了便于在杠杆上直接读出力臂的大小,在A点沿
竖直
向下方向拉动弹簧测力计,直至杠杆在水平
位置平衡。并将第一次数据记录在表格中,表中$F_{1}$的大小为弹簧测力计示数,$F_{2}$的大小为钩码的重力,$l_{1}$、$l_{2}$分别为$F_{1}$、$F_{2}$对应的力臂。(3)接下来,小明又进行了三次实验,将实验数据填在表中,最后总结得出规律。每次实验总是在前一次基础上改变$F_{2}$、$l_{1}$、$l_{2}$中的一个物理量。小明分析数据后发现,第
4
次实验与前一次改变的量相同,需要将该实验步骤调整为保持$F_{2}$和$l_{1}$不变,改变$l_{2}$的大小
。答案:6. (1) 平衡 右 (2) 竖直 水平 (3) 4 保持$F_{2}$和$l_{1}$不变,改变$l_{2}$的大小
解析:
【分析】
首先梳理这道题的解题思路:1. 第一小问先回忆杠杆平衡的定义,只要杠杆处于静止或者匀速转动状态,都属于平衡状态,不需要必须水平;调平杠杆时,平衡螺母始终向杠杆上翘的一侧调节,观察图甲杠杆左端低右端高,就能判断调节方向。2. 第二小问,要直接从杠杆刻度上读取力臂,需要拉力方向与杠杆垂直,也就是竖直向下拉动,让杠杆最终在水平位置平衡,此时力臂和杠杆重合,无需额外测量就能直接读数。3. 第三小问,按照实验要求每次仅改变$F_{2}$、$l_{1}$、$l_{2}$中的一个物理量,对比各组实验的变量差异,就能找出哪两次改变的是同一个物理量,再调整对应的变量控制操作即可。
【解析】
(1)根据杠杆平衡的定义,静止的杠杆属于平衡状态,图甲中杠杆静止,因此此时杠杆处于平衡状态;此时杠杆左端下沉、右端向上翘起,为使杠杆在水平位置平衡,平衡螺母需要向翘起的右侧调节。
(2)为了让拉力的力臂与杠杆刻度完全重合,方便直接读出力臂大小,需要在A点沿竖直向下的方向拉动弹簧测力计,直至杠杆在水平位置平衡,此时拉力方向与杠杆垂直,力臂长度可以直接从杠杆刻度读取。
(3)实验要求每次只在前一次基础上改变$F_{2}$、$l_{1}$、$l_{2}$中的一个物理量,对比实验数据可以发现第4次实验和前一次改变的物理量完全相同,不符合单一变量的实验要求,因此需要将该实验步骤调整为保持$F_{2}$和$l_{1}$不变,改变$l_{2}$的大小,保证每次仅改变一个变量。
【答案】
(1) 平衡 右 (2) 竖直 水平 (3) 4 保持$F_{2}$和$l_{1}$不变,改变$l_{2}$的大小
【知识点】
杠杆平衡判定;杠杆调平操作;杠杆实验变量控制
【点评】
本题是探究杠杆平衡条件的经典实验题,前两问侧重考察基础实验操作的原理,第三问侧重考察多次实验的变量控制逻辑,能帮助学生理解多次实验得出普遍规律的设计思路,避免出现重复改变同一变量的实验错误。
【难度系数】
0.6
首先梳理这道题的解题思路:1. 第一小问先回忆杠杆平衡的定义,只要杠杆处于静止或者匀速转动状态,都属于平衡状态,不需要必须水平;调平杠杆时,平衡螺母始终向杠杆上翘的一侧调节,观察图甲杠杆左端低右端高,就能判断调节方向。2. 第二小问,要直接从杠杆刻度上读取力臂,需要拉力方向与杠杆垂直,也就是竖直向下拉动,让杠杆最终在水平位置平衡,此时力臂和杠杆重合,无需额外测量就能直接读数。3. 第三小问,按照实验要求每次仅改变$F_{2}$、$l_{1}$、$l_{2}$中的一个物理量,对比各组实验的变量差异,就能找出哪两次改变的是同一个物理量,再调整对应的变量控制操作即可。
【解析】
(1)根据杠杆平衡的定义,静止的杠杆属于平衡状态,图甲中杠杆静止,因此此时杠杆处于平衡状态;此时杠杆左端下沉、右端向上翘起,为使杠杆在水平位置平衡,平衡螺母需要向翘起的右侧调节。
(2)为了让拉力的力臂与杠杆刻度完全重合,方便直接读出力臂大小,需要在A点沿竖直向下的方向拉动弹簧测力计,直至杠杆在水平位置平衡,此时拉力方向与杠杆垂直,力臂长度可以直接从杠杆刻度读取。
(3)实验要求每次只在前一次基础上改变$F_{2}$、$l_{1}$、$l_{2}$中的一个物理量,对比实验数据可以发现第4次实验和前一次改变的物理量完全相同,不符合单一变量的实验要求,因此需要将该实验步骤调整为保持$F_{2}$和$l_{1}$不变,改变$l_{2}$的大小,保证每次仅改变一个变量。
【答案】
(1) 平衡 右 (2) 竖直 水平 (3) 4 保持$F_{2}$和$l_{1}$不变,改变$l_{2}$的大小
【知识点】
杠杆平衡判定;杠杆调平操作;杠杆实验变量控制
【点评】
本题是探究杠杆平衡条件的经典实验题,前两问侧重考察基础实验操作的原理,第三问侧重考察多次实验的变量控制逻辑,能帮助学生理解多次实验得出普遍规律的设计思路,避免出现重复改变同一变量的实验错误。
【难度系数】
0.6