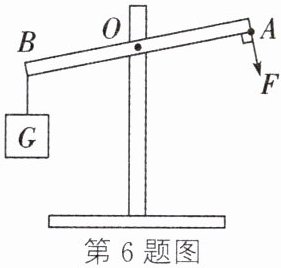
6 用如图所示的杠杆提升重物,设作用在A端的力F始终与杠杆垂直,那么,在将重物提升到最高处的过程中,力F的大小将 (
A.逐渐变小
B.先变小后变大
C.逐渐变大
D.先变大后变小
D
)A.逐渐变小
B.先变小后变大
C.逐渐变大
D.先变大后变小
答案:6. D
解析:
【分析】
我们可以从杠杆平衡条件入手逐步推导:第一步先确定全程不变的物理量,由于力F始终和杠杆垂直,所以动力臂的长度就等于支点O到A点的杆长OA,整个提升过程中动力臂保持不变;阻力是重物的重力G,重物重力的大小也始终恒定。第二步分析阻力臂的变化规律,阻力臂是支点O到重力G的竖直作用线的垂直距离:杠杆从初始倾斜位置向上转到水平位置的过程中,阻力臂会逐渐变大,杠杆处于水平位置时阻力臂达到最大值;之后杠杆继续转动、越过水平位置向更高处抬升时,支点到重力作用线的垂直距离又会逐渐变小。第三步代入杠杆平衡公式变形可得F=(G·L阻)/L动,G和动力臂都不变,阻力臂先增后减,因此动力F就先变大后变小,即可选出正确选项。
【解析】
解:根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $ 分析:
1. 明确不变量:力F始终与杠杆垂直,因此动力臂 $ L_F = OA $,在重物提升的全过程中动力臂长度保持不变;阻力为重物的重力G,G的大小恒定不变。
2. 分析阻力臂的变化:阻力臂是支点O到重力G的竖直作用线的垂直距离:
杠杆从初始倾斜位置转动到水平位置的过程中,阻力臂逐渐增大,杠杆水平时阻力臂达到最大值(等于OB的长度);
杠杆越过水平位置继续向上抬升的过程中,阻力臂会逐渐减小。
3. 代入平衡公式变形得:$ F = \frac{G · L_{\mathrm{阻}}}{L_F} $,由于G、$ L_F $ 不变,$ L_{\mathrm{阻}} $ 先变大后变小,因此力F的大小先变大后变小。
【答案】D
【知识点】杠杆平衡条件,力臂的定义
【点评】本题的易错点是很多同学会误认为提升过程中阻力臂一直增大,忽略杠杆越过水平位置后阻力臂会减小的规律,解题核心是牢牢抓住力臂的定义:力臂是支点到力的作用线的垂直距离,而非支点到力的作用点的杠杆长度,结合不变量即可顺利推导出动力的变化规律。
【难度系数】0.4
我们可以从杠杆平衡条件入手逐步推导:第一步先确定全程不变的物理量,由于力F始终和杠杆垂直,所以动力臂的长度就等于支点O到A点的杆长OA,整个提升过程中动力臂保持不变;阻力是重物的重力G,重物重力的大小也始终恒定。第二步分析阻力臂的变化规律,阻力臂是支点O到重力G的竖直作用线的垂直距离:杠杆从初始倾斜位置向上转到水平位置的过程中,阻力臂会逐渐变大,杠杆处于水平位置时阻力臂达到最大值;之后杠杆继续转动、越过水平位置向更高处抬升时,支点到重力作用线的垂直距离又会逐渐变小。第三步代入杠杆平衡公式变形可得F=(G·L阻)/L动,G和动力臂都不变,阻力臂先增后减,因此动力F就先变大后变小,即可选出正确选项。
【解析】
解:根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $ 分析:
1. 明确不变量:力F始终与杠杆垂直,因此动力臂 $ L_F = OA $,在重物提升的全过程中动力臂长度保持不变;阻力为重物的重力G,G的大小恒定不变。
2. 分析阻力臂的变化:阻力臂是支点O到重力G的竖直作用线的垂直距离:
杠杆从初始倾斜位置转动到水平位置的过程中,阻力臂逐渐增大,杠杆水平时阻力臂达到最大值(等于OB的长度);
杠杆越过水平位置继续向上抬升的过程中,阻力臂会逐渐减小。
3. 代入平衡公式变形得:$ F = \frac{G · L_{\mathrm{阻}}}{L_F} $,由于G、$ L_F $ 不变,$ L_{\mathrm{阻}} $ 先变大后变小,因此力F的大小先变大后变小。
【答案】D
【知识点】杠杆平衡条件,力臂的定义
【点评】本题的易错点是很多同学会误认为提升过程中阻力臂一直增大,忽略杠杆越过水平位置后阻力臂会减小的规律,解题核心是牢牢抓住力臂的定义:力臂是支点到力的作用线的垂直距离,而非支点到力的作用点的杠杆长度,结合不变量即可顺利推导出动力的变化规律。
【难度系数】0.4
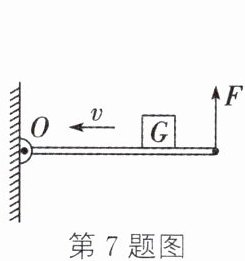
7 如图所示,有一轻质木板(质量忽略不计)长为$ L $,左端可绕$ O $点转动,右端放一重为$ G $的物块,并用一竖直向上的力$ F $拉着。当物块向左匀速滑动时,木板始终在水平位置保持静止,则下列表示拉力$ F $与物块运动时间$ t $的关系图中,正确的是(

A
)答案:7. A
解析:
【分析】
这是一道结合匀速运动的动态杠杆平衡问题,解题思路如下:
1. 首先明确杠杆的支点为左端的O点,先区分杠杆的动力、阻力以及对应的力臂:拉力F是动力,物块的重力G是阻力;
2. 由于拉力F竖直向上、木板始终保持水平,因此动力F的力臂始终等于木板的总长度L,是固定不变的;
3. 物块向左匀速滑动,设滑动速度为v,那么经过时间t,物块移动的距离为vt,此时物块到支点O的距离(也就是阻力G的力臂)可以表示为L-vt,随时间均匀减小;
4. 代入杠杆平衡条件推导F和t的关系式,根据函数的变化规律就能匹配对应的图像。
【解析】
解:设物块匀速向左滑动的速度为v,
根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $,本题中动力为F,动力臂$ L_1 = L $(恒定不变),阻力为物块重力G,t时刻阻力臂为物块到支点O的距离:$ L_2 = L - vt $,
代入杠杆平衡公式得:
$ F · L = G · (L - vt) $
整理后得到拉力F与时间t的关系:
$ F = G - \frac{Gv}{L} · t $
该式为一次函数,F随t的增大均匀减小,t=0时F=G,当物块滑到支点O处时F=0,对应的图像是从F=G出发、斜向下降到0的直线,因此正确选项为A。
【答案】A
【知识点】杠杆平衡条件,动态杠杆分析
【点评】本题将匀速直线运动和杠杆平衡结合,属于典型的动态杠杆图像题,解题核心是把随时间变化的阻力臂用t表示,推导得到F和t的定量关系即可判断图像,避免凭直觉错误认为F是线性增大的误区。
【难度系数】0.6
这是一道结合匀速运动的动态杠杆平衡问题,解题思路如下:
1. 首先明确杠杆的支点为左端的O点,先区分杠杆的动力、阻力以及对应的力臂:拉力F是动力,物块的重力G是阻力;
2. 由于拉力F竖直向上、木板始终保持水平,因此动力F的力臂始终等于木板的总长度L,是固定不变的;
3. 物块向左匀速滑动,设滑动速度为v,那么经过时间t,物块移动的距离为vt,此时物块到支点O的距离(也就是阻力G的力臂)可以表示为L-vt,随时间均匀减小;
4. 代入杠杆平衡条件推导F和t的关系式,根据函数的变化规律就能匹配对应的图像。
【解析】
解:设物块匀速向左滑动的速度为v,
根据杠杆平衡条件 $ F_1L_1 = F_2L_2 $,本题中动力为F,动力臂$ L_1 = L $(恒定不变),阻力为物块重力G,t时刻阻力臂为物块到支点O的距离:$ L_2 = L - vt $,
代入杠杆平衡公式得:
$ F · L = G · (L - vt) $
整理后得到拉力F与时间t的关系:
$ F = G - \frac{Gv}{L} · t $
该式为一次函数,F随t的增大均匀减小,t=0时F=G,当物块滑到支点O处时F=0,对应的图像是从F=G出发、斜向下降到0的直线,因此正确选项为A。
【答案】A
【知识点】杠杆平衡条件,动态杠杆分析
【点评】本题将匀速直线运动和杠杆平衡结合,属于典型的动态杠杆图像题,解题核心是把随时间变化的阻力臂用t表示,推导得到F和t的定量关系即可判断图像,避免凭直觉错误认为F是线性增大的误区。
【难度系数】0.6
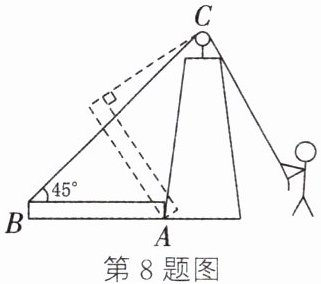
8 如图所示,士兵用力缓慢匀速拉动绳子,在杠杆 AB 缓慢匀速升至虚线位置的过程,士兵所施加的力的大小变化是(
A.变大
B.变小
C.先变大后变小
D.先变小后变大
B
)A.变大
B.变小
C.先变大后变小
D.先变小后变大
答案:8. B
解析:
【分析】
这是典型的动态杠杆平衡问题,解题思路如下:第一步先确定杠杆的支点为A点,明确杠杆的阻力是顶端C点重物的重力,阻力大小始终恒定不变;第二步分别分析杠杆抬升过程中动力臂、阻力臂的变化:阻力为竖直向下的重力,随着杠杆绕A点向上转动,支点A到重力作用线的垂直距离即阻力臂会逐渐减小,同时支点A到拉力作用线的垂直距离即动力臂会逐渐增大;第三步结合杠杆平衡条件推导拉力的变化,即可得到结论。
【解析】
解:
1. 确定研究对象与阻力:本题中绕A点转动的装置为杠杆,杠杆受到的阻力是顶端C点重物的重力,重物重力保持不变,即阻力$F_2=G$恒定。
2. 分析阻力臂变化:阻力方向始终竖直向下,当杠杆AB绕A点缓慢抬升时,C点逐渐向A点的正上方靠近,支点A到重力作用线的垂直距离(阻力臂$L_2$)不断减小。
3. 分析动力臂变化:动力是士兵对绳子的拉力,拉力方向沿绳子方向,随着C点抬升,支点A到拉力作用线的垂直距离(动力臂$L_1$)不断增大。
4. 代入杠杆平衡条件:根据杠杆平衡公式$F_1L_1=F_2L_2$,变形可得$F_1=\frac{F_2L_2}{L_1}$,由于$F_2$不变,$L_1$增大、$L_2$减小,因此动力$F_1$的数值不断变小,即士兵施加的力逐渐变小。
综上,答案选B。
【答案】B
【知识点】
杠杆平衡条件,力臂判断,动态杠杆分析
【点评】
本题重点考察对杠杆五要素和平衡条件的理解应用,易错点是错误判断动力臂、阻力臂的变化趋势,解题核心是先锁定支点,准确识别两个力对应的力臂变化,无需复杂计算即可推导出力的变化规律。
【难度系数】
0.6
这是典型的动态杠杆平衡问题,解题思路如下:第一步先确定杠杆的支点为A点,明确杠杆的阻力是顶端C点重物的重力,阻力大小始终恒定不变;第二步分别分析杠杆抬升过程中动力臂、阻力臂的变化:阻力为竖直向下的重力,随着杠杆绕A点向上转动,支点A到重力作用线的垂直距离即阻力臂会逐渐减小,同时支点A到拉力作用线的垂直距离即动力臂会逐渐增大;第三步结合杠杆平衡条件推导拉力的变化,即可得到结论。
【解析】
解:
1. 确定研究对象与阻力:本题中绕A点转动的装置为杠杆,杠杆受到的阻力是顶端C点重物的重力,重物重力保持不变,即阻力$F_2=G$恒定。
2. 分析阻力臂变化:阻力方向始终竖直向下,当杠杆AB绕A点缓慢抬升时,C点逐渐向A点的正上方靠近,支点A到重力作用线的垂直距离(阻力臂$L_2$)不断减小。
3. 分析动力臂变化:动力是士兵对绳子的拉力,拉力方向沿绳子方向,随着C点抬升,支点A到拉力作用线的垂直距离(动力臂$L_1$)不断增大。
4. 代入杠杆平衡条件:根据杠杆平衡公式$F_1L_1=F_2L_2$,变形可得$F_1=\frac{F_2L_2}{L_1}$,由于$F_2$不变,$L_1$增大、$L_2$减小,因此动力$F_1$的数值不断变小,即士兵施加的力逐渐变小。
综上,答案选B。
【答案】B
【知识点】
杠杆平衡条件,力臂判断,动态杠杆分析
【点评】
本题重点考察对杠杆五要素和平衡条件的理解应用,易错点是错误判断动力臂、阻力臂的变化趋势,解题核心是先锁定支点,准确识别两个力对应的力臂变化,无需复杂计算即可推导出力的变化规律。
【难度系数】
0.6
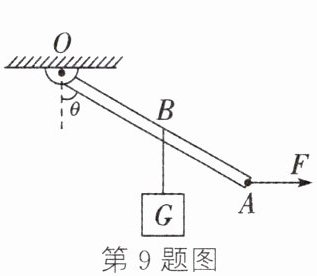
9 如图所示,OA 是一根轻质杠杆,杠杆中间悬挂一重物 G,A 端自始至终受到一个水平方向的拉力F 的作用,在将杠杆慢慢沿逆时针方向转动的过程中,下列关于力 F 的说法正确的是 (
A.力 F 变大,F 的力臂变大
B.力 F 变大,F 的力臂变小
C.力 F 变小,F 的力臂变小
D.力 F 变小,F 的力臂变大
B
)A.力 F 变大,F 的力臂变大
B.力 F 变大,F 的力臂变小
C.力 F 变小,F 的力臂变小
D.力 F 变小,F 的力臂变大
答案:9. B
解析:
【分析】
我们可以按照杠杆动态平衡的分析逻辑逐步推导:首先明确支点为O,核心依据是杠杆平衡条件$F_1L_1=F_2L_2$。第一步先分析动力F的力臂:F始终水平向右,力臂是支点O到F作用线的垂直距离,设OA总长为L,杠杆与竖直方向夹角为θ时,F的力臂为$L·\cosθ$,杠杆逆时针转动过程中θ逐渐增大,$\cosθ$逐渐减小,因此F的力臂会变小。第二步分析阻力和阻力臂:阻力等于重物G的重力,大小始终不变;阻力是竖直向下的重力,阻力臂是支点O到重力作用线的垂直距离,设OB长度为$L_B$,阻力臂为$L_B·\sinθ$,θ增大时$\sinθ$逐渐增大,因此阻力臂会变大。第三步代入杠杆平衡公式,阻力G不变,动力臂变小、阻力臂变大,就可以推导出动力F必然变大,最终得到结论。
【解析】
1. 确定研究对象:本题为轻质杠杆,自重不计,支点为O点。
2. 分析动力臂变化:拉力F始终沿水平向右方向,动力臂是支点O到F的作用线的垂直距离。设OA长度为L,杠杆与竖直虚线的夹角为θ,此时动力臂$L_F = OA·\cosθ$。杠杆缓慢沿逆时针转动时θ不断增大,$\cosθ$不断减小,因此动力F的力臂逐渐变小。
3. 分析阻力与阻力臂变化:阻力为重物G的重力,大小保持不变;阻力方向竖直向下,阻力臂是支点O到重力作用线的垂直距离,设OB长度为$L_B$,此时阻力臂$L_G = OB·\sinθ$。θ增大时$\sinθ$不断增大,因此阻力臂逐渐变大。
4. 代入杠杆平衡条件:由$F· L_F = G· L_G$变形可得$F=\frac{G· L_G}{L_F}$,由于G不变,$L_G$变大、$L_F$变小,因此动力F的数值逐渐变大。
综上,力F变大,F的力臂变小,选项B正确。
【答案】B
【知识点】杠杆平衡条件,力臂的判断
【点评】本题是杠杆动态平衡的典型题型,易错点是无法准确判断转动过程中动力臂、阻力臂的变化,解题的核心是牢记力臂是支点到力的作用线的垂直距离,结合三角函数的变化规律分析两个力臂的改变,再代入平衡条件推导动力变化即可。
【难度系数】0.6
我们可以按照杠杆动态平衡的分析逻辑逐步推导:首先明确支点为O,核心依据是杠杆平衡条件$F_1L_1=F_2L_2$。第一步先分析动力F的力臂:F始终水平向右,力臂是支点O到F作用线的垂直距离,设OA总长为L,杠杆与竖直方向夹角为θ时,F的力臂为$L·\cosθ$,杠杆逆时针转动过程中θ逐渐增大,$\cosθ$逐渐减小,因此F的力臂会变小。第二步分析阻力和阻力臂:阻力等于重物G的重力,大小始终不变;阻力是竖直向下的重力,阻力臂是支点O到重力作用线的垂直距离,设OB长度为$L_B$,阻力臂为$L_B·\sinθ$,θ增大时$\sinθ$逐渐增大,因此阻力臂会变大。第三步代入杠杆平衡公式,阻力G不变,动力臂变小、阻力臂变大,就可以推导出动力F必然变大,最终得到结论。
【解析】
1. 确定研究对象:本题为轻质杠杆,自重不计,支点为O点。
2. 分析动力臂变化:拉力F始终沿水平向右方向,动力臂是支点O到F的作用线的垂直距离。设OA长度为L,杠杆与竖直虚线的夹角为θ,此时动力臂$L_F = OA·\cosθ$。杠杆缓慢沿逆时针转动时θ不断增大,$\cosθ$不断减小,因此动力F的力臂逐渐变小。
3. 分析阻力与阻力臂变化:阻力为重物G的重力,大小保持不变;阻力方向竖直向下,阻力臂是支点O到重力作用线的垂直距离,设OB长度为$L_B$,此时阻力臂$L_G = OB·\sinθ$。θ增大时$\sinθ$不断增大,因此阻力臂逐渐变大。
4. 代入杠杆平衡条件:由$F· L_F = G· L_G$变形可得$F=\frac{G· L_G}{L_F}$,由于G不变,$L_G$变大、$L_F$变小,因此动力F的数值逐渐变大。
综上,力F变大,F的力臂变小,选项B正确。
【答案】B
【知识点】杠杆平衡条件,力臂的判断
【点评】本题是杠杆动态平衡的典型题型,易错点是无法准确判断转动过程中动力臂、阻力臂的变化,解题的核心是牢记力臂是支点到力的作用线的垂直距离,结合三角函数的变化规律分析两个力臂的改变,再代入平衡条件推导动力变化即可。
【难度系数】0.6
10 如图所示为父子两人一起抬货物的示意图,$F_1$、$F_2$ 为父子两人肩膀所受压力。走在后方的儿子偷偷将货物从 $a$ 位置移到 $b$ 位置,则(
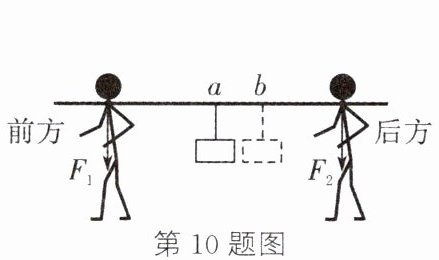
A.$F_1$ 变大,$F_2$ 变小
B.$F_1$、$F_2$ 保持不变
C.$F_1$ 变大,$F_2$ 变大
D.$F_1$ 变小,$F_2$ 变大
D
)A.$F_1$ 变大,$F_2$ 变小
B.$F_1$、$F_2$ 保持不变
C.$F_1$ 变大,$F_2$ 变大
D.$F_1$ 变小,$F_2$ 变大
答案:10. D 【解析】走在后方的儿子偷偷将货物从a位置移到b位置,对于父亲来说,儿子的肩膀为支点,此时阻力大小不变,阻力臂变小,动力臂不变,根据杠杆的平衡条件可知,父亲施加的力变小,由力的作用是相互的可知,$F_1$变小;对于儿子来说,父亲的肩膀为支点,此时阻力大小不变,阻力臂变大,动力臂不变,根据杠杆的平衡条件可知,儿子施加的力变大,同理可知,$F_2$变大,故D正确。
解析:
【分析】
这道题是杠杆平衡条件的实际应用,解题思路是把两人抬的横杆当作可绕支点转动的杠杆,通过两次选取不同的支点分别分析两个力的变化:第一步先选后方儿子的肩膀作为支点,明确阻力是货物重力,动力臂是父子肩膀的总间距,货物向儿子移动时阻力臂变小,结合杠杆平衡条件就能推出父亲对横杆的支持力变化,再通过力的相互性得到F1的变化;第二步再选前方父亲的肩膀作为支点,此时货物向儿子移动时阻力臂变大,同理结合杠杆平衡条件推出儿子对横杆的支持力变化,就能得到F2的变化,最终匹配出正确选项。
【解析】
将抬货物的横杆等效为杠杆,分两次选取支点推导:
1. 以儿子的肩膀为支点分析:
阻力为货物的重力G,大小始终不变;动力是父亲对横杆向上的支持力,动力臂为父子两人肩膀之间的总距离,该距离保持不变。货物从a位置移到b位置时,货物到儿子肩膀的阻力臂变小,根据杠杆平衡条件$F_{动1} · L_{总} = G · L_{阻1}$,可知父亲对横杆的支持力变小。根据力的作用是相互的,横杆对父亲肩膀的压力$F_1$等于父亲对横杆的支持力,因此$F_1$变小。
2. 以父亲的肩膀为支点分析:
阻力仍为货物的重力G,大小不变;动力是儿子对横杆向上的支持力,动力臂仍为父子两人肩膀之间的总距离,保持不变。货物从a位置移到b位置时,货物到父亲肩膀的阻力臂变大,根据杠杆平衡条件$F_{动2} · L_{总} = G · L_{阻2}$,可知儿子对横杆的支持力变大。根据力的作用是相互的,横杆对儿子肩膀的压力$F_2$等于儿子对横杆的支持力,因此$F_2$变大。
综上可得$F_1$变小,$F_2$变大,选项D正确。
【答案】D
【知识点】杠杆平衡条件,力的作用相互性
【点评】本题的核心技巧是对抬杆问题两次选取不同施力点作为支点,避免复杂的联立计算,直接通过阻力臂的变化判断力的大小变化,易错点是容易搞反两次支点对应的阻力臂变化方向,解题时可以在图上标注出两次的阻力臂长度,就能直观判断长度的增减。
【难度系数】0.6
这道题是杠杆平衡条件的实际应用,解题思路是把两人抬的横杆当作可绕支点转动的杠杆,通过两次选取不同的支点分别分析两个力的变化:第一步先选后方儿子的肩膀作为支点,明确阻力是货物重力,动力臂是父子肩膀的总间距,货物向儿子移动时阻力臂变小,结合杠杆平衡条件就能推出父亲对横杆的支持力变化,再通过力的相互性得到F1的变化;第二步再选前方父亲的肩膀作为支点,此时货物向儿子移动时阻力臂变大,同理结合杠杆平衡条件推出儿子对横杆的支持力变化,就能得到F2的变化,最终匹配出正确选项。
【解析】
将抬货物的横杆等效为杠杆,分两次选取支点推导:
1. 以儿子的肩膀为支点分析:
阻力为货物的重力G,大小始终不变;动力是父亲对横杆向上的支持力,动力臂为父子两人肩膀之间的总距离,该距离保持不变。货物从a位置移到b位置时,货物到儿子肩膀的阻力臂变小,根据杠杆平衡条件$F_{动1} · L_{总} = G · L_{阻1}$,可知父亲对横杆的支持力变小。根据力的作用是相互的,横杆对父亲肩膀的压力$F_1$等于父亲对横杆的支持力,因此$F_1$变小。
2. 以父亲的肩膀为支点分析:
阻力仍为货物的重力G,大小不变;动力是儿子对横杆向上的支持力,动力臂仍为父子两人肩膀之间的总距离,保持不变。货物从a位置移到b位置时,货物到父亲肩膀的阻力臂变大,根据杠杆平衡条件$F_{动2} · L_{总} = G · L_{阻2}$,可知儿子对横杆的支持力变大。根据力的作用是相互的,横杆对儿子肩膀的压力$F_2$等于儿子对横杆的支持力,因此$F_2$变大。
综上可得$F_1$变小,$F_2$变大,选项D正确。
【答案】D
【知识点】杠杆平衡条件,力的作用相互性
【点评】本题的核心技巧是对抬杆问题两次选取不同施力点作为支点,避免复杂的联立计算,直接通过阻力臂的变化判断力的大小变化,易错点是容易搞反两次支点对应的阻力臂变化方向,解题时可以在图上标注出两次的阻力臂长度,就能直观判断长度的增减。
【难度系数】0.6
11 一根粗细均匀的木棒,斜靠在竖直墙壁上。墙壁光滑,地面粗糙,木棒受到的重力为$G$,墙壁对木棒的弹力为$F$,如图所示,现让木棒的倾斜度变小一些至虚线所示位置,木棒仍能静止斜靠在墙壁上,则与原来相比,$G$和$F$变化情况为(
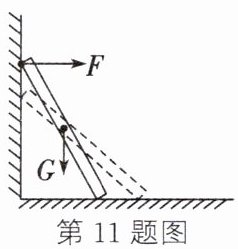
A.$G$不变,$F$变小
B.$G$不变,$F$变大
C.$G$变化,$F$变小
D.$G$变化,$F$变大
B
)A.$G$不变,$F$变小
B.$G$不变,$F$变大
C.$G$变化,$F$变小
D.$G$变化,$F$变大
答案:11. B
解析:
【分析】
首先第一步先判断重力的变化:同一根木棒质量不变,重力是由质量决定的,因此G肯定保持不变,直接排除C、D两个错误选项。接下来我们可以把木棒当作杠杆处理,选择木棒和地面的接触点作为支点,这样地面对木棒的支持力、摩擦力的作用线都经过支点,力臂为0,不需要考虑这两个力对杠杆转动的影响。之后分别分析两个力的力臂变化:水平弹力F的力臂是支点到F作用线的竖直高度,重力G的力臂是支点到重力作用线的水平距离。当木棒倾斜度变小、逐渐放平的过程中,F对应的力臂会减小,G对应的力臂会增大,结合杠杆平衡条件就能推导出F的变化趋势,得到最终结论。
【解析】
1. 判断重力变化:同一根粗细均匀的木棒质量不变,根据$G=mg$,木棒的重力G保持不变,直接排除选项C、D。
2. 建立杠杆模型:将木棒视为以木棒与地面的接触点为支点的杠杆,此时地面对木棒的所有作用力的力臂都为0,不会影响杠杆的转动平衡。
3. 确定两个力的力臂:墙壁对木棒的弹力F是水平向右的力,它的力臂是支点到F作用线的垂直距离,等于木棒上端距离地面的竖直高度h;木棒的重力G竖直向下,它的力臂是支点到G作用线的水平距离,等于木棒重心到支点的水平距离L。
4. 分析倾斜度变化后的力臂变化:当木棒倾斜度变小,移动到虚线位置时,木棒上端的竖直高度h减小,重心到支点的水平距离L增大。
5. 代入杠杆平衡条件推导:根据杠杆平衡条件$F_1L_1=F_2L_2$,可得$F· h = G· L$,变形得到$F=\frac{G· L}{h}$。由于G不变,L增大、h减小,因此F的数值变大。
综上,G不变,F变大,答案选B。
【答案】
B
【知识点】
杠杆平衡条件
重力与质量关系
【点评】
本题的核心是将静止的木棒转化为杠杆模型求解,选择地面接触点作为支点可以大幅简化受力分析,易错点是错误判断两个力的力臂随木棒倾斜度变化的趋势,需要严格按照力臂的定义,从支点向力的作用线作垂线来准确判断力臂的大小变化。
【难度系数】
0.6
首先第一步先判断重力的变化:同一根木棒质量不变,重力是由质量决定的,因此G肯定保持不变,直接排除C、D两个错误选项。接下来我们可以把木棒当作杠杆处理,选择木棒和地面的接触点作为支点,这样地面对木棒的支持力、摩擦力的作用线都经过支点,力臂为0,不需要考虑这两个力对杠杆转动的影响。之后分别分析两个力的力臂变化:水平弹力F的力臂是支点到F作用线的竖直高度,重力G的力臂是支点到重力作用线的水平距离。当木棒倾斜度变小、逐渐放平的过程中,F对应的力臂会减小,G对应的力臂会增大,结合杠杆平衡条件就能推导出F的变化趋势,得到最终结论。
【解析】
1. 判断重力变化:同一根粗细均匀的木棒质量不变,根据$G=mg$,木棒的重力G保持不变,直接排除选项C、D。
2. 建立杠杆模型:将木棒视为以木棒与地面的接触点为支点的杠杆,此时地面对木棒的所有作用力的力臂都为0,不会影响杠杆的转动平衡。
3. 确定两个力的力臂:墙壁对木棒的弹力F是水平向右的力,它的力臂是支点到F作用线的垂直距离,等于木棒上端距离地面的竖直高度h;木棒的重力G竖直向下,它的力臂是支点到G作用线的水平距离,等于木棒重心到支点的水平距离L。
4. 分析倾斜度变化后的力臂变化:当木棒倾斜度变小,移动到虚线位置时,木棒上端的竖直高度h减小,重心到支点的水平距离L增大。
5. 代入杠杆平衡条件推导:根据杠杆平衡条件$F_1L_1=F_2L_2$,可得$F· h = G· L$,变形得到$F=\frac{G· L}{h}$。由于G不变,L增大、h减小,因此F的数值变大。
综上,G不变,F变大,答案选B。
【答案】
B
【知识点】
杠杆平衡条件
重力与质量关系
【点评】
本题的核心是将静止的木棒转化为杠杆模型求解,选择地面接触点作为支点可以大幅简化受力分析,易错点是错误判断两个力的力臂随木棒倾斜度变化的趋势,需要严格按照力臂的定义,从支点向力的作用线作垂线来准确判断力臂的大小变化。
【难度系数】
0.6