知识体系构建
脉络梳理,构建知识体系
简单机械
杠杆
定义 — 在力的作用下可绕①
五要素 — 支点$(O)$、动力$(F_{1})$、阻力$(F_{2})$、动力臂$(l_{1})$、阻力臂$(l_{2})$。
杠杆的平衡条件 — ②
分类
省力杠杆 — $l_1>l_2$,$F_1<F_2$。
费力杠杆 — $l_1<l_2$,$F_1>F_2$。
等臂杠杆 — $l_1=l_2$,$F_1=F_2$。
滑轮
定滑轮
实质 — ③
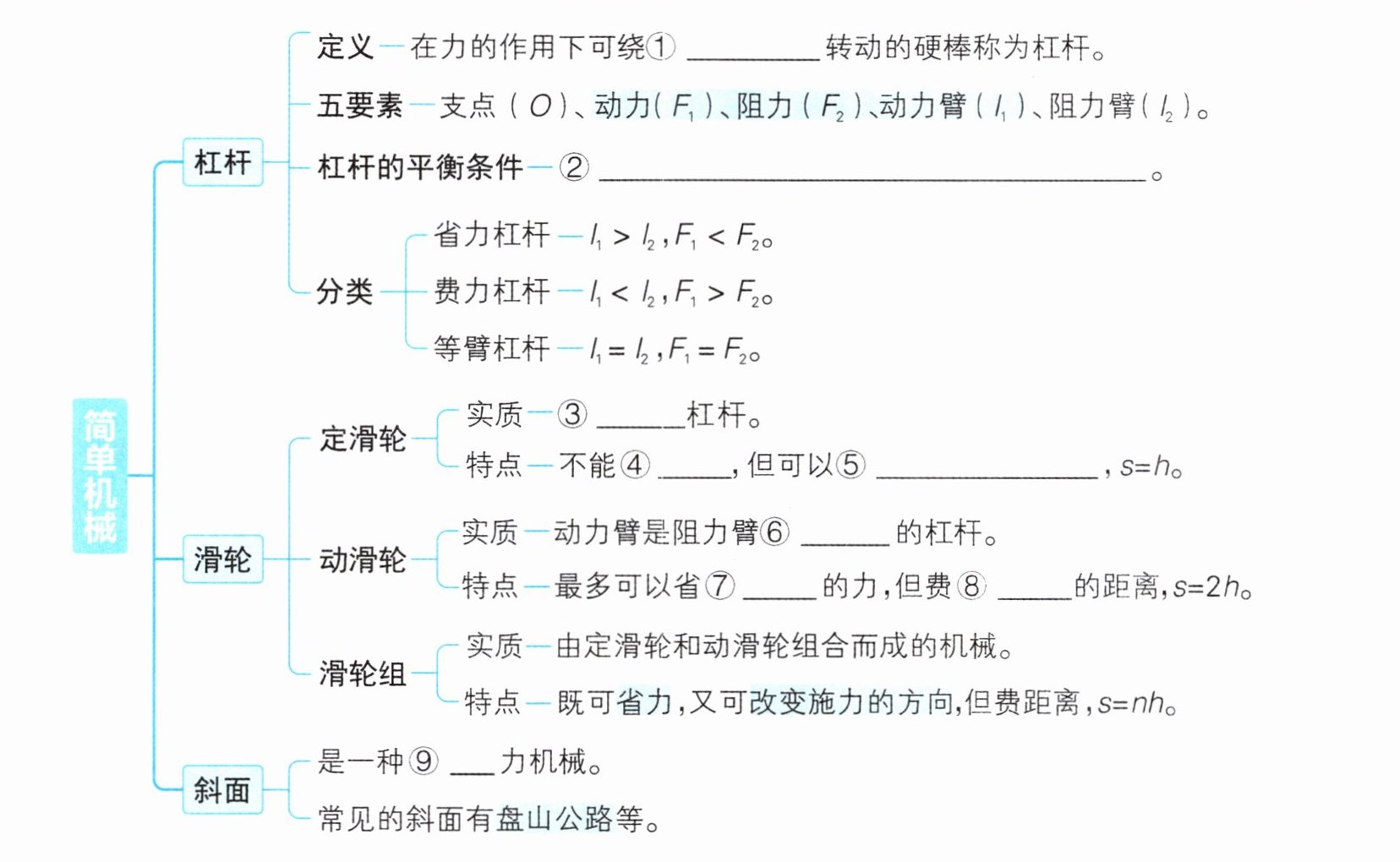
特点 — 不能④
动滑轮
实质 — 动力臂是阻力臂⑥
特点 — 最多可以省⑦
滑轮组
实质 — 由定滑轮和动滑轮组合而成的机械。
特点 — 既可省力,又可改变施力的方向,但费距离,$s=nh$。
斜面
是一种⑨
常见的斜面有盘山公路等。
脉络梳理,构建知识体系
简单机械
杠杆
定义 — 在力的作用下可绕①
一固定点
转动的硬棒称为杠杆。五要素 — 支点$(O)$、动力$(F_{1})$、阻力$(F_{2})$、动力臂$(l_{1})$、阻力臂$(l_{2})$。
杠杆的平衡条件 — ②
动力×动力臂=阻力×阻力臂(或$F_{1}l_{1}=F_{2}l_{2}$)
。分类
省力杠杆 — $l_1>l_2$,$F_1<F_2$。
费力杠杆 — $l_1<l_2$,$F_1>F_2$。
等臂杠杆 — $l_1=l_2$,$F_1=F_2$。
滑轮
定滑轮
实质 — ③
等臂
杠杆。特点 — 不能④
省力
,但可以⑤ 改变施力的方向
,$s=h$。动滑轮
实质 — 动力臂是阻力臂⑥
两倍
的杠杆。特点 — 最多可以省⑦
一半
的力,但费⑧ 两倍
的距离,$s=2h$。滑轮组
实质 — 由定滑轮和动滑轮组合而成的机械。
特点 — 既可省力,又可改变施力的方向,但费距离,$s=nh$。
斜面
是一种⑨
省
力机械。常见的斜面有盘山公路等。
答案:① 一固定点 ② 动力×动力臂=阻力×阻力臂(或$F_{1}l_{1}=$$F_{2}l_{2}$) ③ 等臂 ④ 省力 ⑤ 改变施力的方向 ⑥ 两倍⑦ 一半 ⑧ 两倍 ⑨ 省
解析:
【分析】
这是简单机械章节的基础概念梳理填空题,解题思路是逐一对应课本中杠杆、滑轮、斜面的核心定义与性质:
1. 先回忆杠杆的基础定义,杠杆的核心特征是绕固定的支点转动,对应填写①的内容;
2. 接着回忆杠杆平衡实验得出的结论,直接对应杠杆平衡条件的表述;
3. 回忆定滑轮的本质,定滑轮支点在轮心,动力臂和阻力臂都等于轮半径,属于等臂杠杆,由此推导它的功能特点;
4. 再回忆动滑轮的本质,动滑轮支点在绳与轮的接触边缘,动力臂是轮的直径、阻力臂是轮的半径,由此推导动滑轮的力和距离的特点;
5. 最后回忆斜面的性质,斜面通过增加运动长度减小作用力,对应填写最后一空即可。
【解析】
我们逐个完成对应填空:
① 按照杠杆的标准定义,在力的作用下可绕一固定点转动的硬棒称为杠杆;
② 杠杆平衡的核心规律为动力×动力臂=阻力×阻力臂,也可写作公式形式$F_1l_1=F_2l_2$;
③ 定滑轮的动力臂与阻力臂长度完全相等,实质是等臂杠杆;
④⑤ 定滑轮的功能特点是不能省力,但可以改变施力的方向,绳子自由端移动距离等于物体上升高度,满足$s=h$;
⑥ 动滑轮的动力臂为轮的直径,阻力臂为轮的半径,实质是动力臂是阻力臂两倍的杠杆;
⑦⑧ 动滑轮的特点是最多可以省一半的力,同时费两倍的距离,绳子自由端移动距离是物体上升高度的2倍,满足$s=2h$;
⑨ 斜面通过延长运动路径来减小所需的作用力,是一种省力机械。
【答案】
① 一固定点 ② 动力×动力臂=阻力×阻力臂(或$F_{1}l_{1}=F_{2}l_{2}$) ③ 等臂 ④ 省力 ⑤ 改变施力的方向 ⑥ 两倍 ⑦ 一半 ⑧ 两倍 ⑨ 省
【知识点】
杠杆定义、滑轮性质、斜面特点
【点评】
本题属于简单机械单元的基础概念梳理题,所有考点均来自课本核心定义与规律,能够帮助学生搭建完整的简单机械知识框架,夯实对各类简单机械本质属性的理解,适合单元复习阶段巩固基础使用。
【难度系数】
0.9
这是简单机械章节的基础概念梳理填空题,解题思路是逐一对应课本中杠杆、滑轮、斜面的核心定义与性质:
1. 先回忆杠杆的基础定义,杠杆的核心特征是绕固定的支点转动,对应填写①的内容;
2. 接着回忆杠杆平衡实验得出的结论,直接对应杠杆平衡条件的表述;
3. 回忆定滑轮的本质,定滑轮支点在轮心,动力臂和阻力臂都等于轮半径,属于等臂杠杆,由此推导它的功能特点;
4. 再回忆动滑轮的本质,动滑轮支点在绳与轮的接触边缘,动力臂是轮的直径、阻力臂是轮的半径,由此推导动滑轮的力和距离的特点;
5. 最后回忆斜面的性质,斜面通过增加运动长度减小作用力,对应填写最后一空即可。
【解析】
我们逐个完成对应填空:
① 按照杠杆的标准定义,在力的作用下可绕一固定点转动的硬棒称为杠杆;
② 杠杆平衡的核心规律为动力×动力臂=阻力×阻力臂,也可写作公式形式$F_1l_1=F_2l_2$;
③ 定滑轮的动力臂与阻力臂长度完全相等,实质是等臂杠杆;
④⑤ 定滑轮的功能特点是不能省力,但可以改变施力的方向,绳子自由端移动距离等于物体上升高度,满足$s=h$;
⑥ 动滑轮的动力臂为轮的直径,阻力臂为轮的半径,实质是动力臂是阻力臂两倍的杠杆;
⑦⑧ 动滑轮的特点是最多可以省一半的力,同时费两倍的距离,绳子自由端移动距离是物体上升高度的2倍,满足$s=2h$;
⑨ 斜面通过延长运动路径来减小所需的作用力,是一种省力机械。
【答案】
① 一固定点 ② 动力×动力臂=阻力×阻力臂(或$F_{1}l_{1}=F_{2}l_{2}$) ③ 等臂 ④ 省力 ⑤ 改变施力的方向 ⑥ 两倍 ⑦ 一半 ⑧ 两倍 ⑨ 省
【知识点】
杠杆定义、滑轮性质、斜面特点
【点评】
本题属于简单机械单元的基础概念梳理题,所有考点均来自课本核心定义与规律,能够帮助学生搭建完整的简单机械知识框架,夯实对各类简单机械本质属性的理解,适合单元复习阶段巩固基础使用。
【难度系数】
0.9
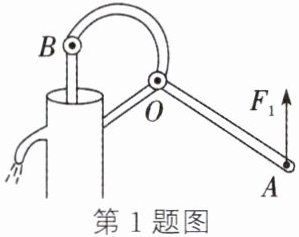
1 如图所示,活塞式抽水机 AOB 部分可视为杠杆,O 为支点,请画出作用在手柄 A 点的动力$F_{1}$的动力臂$l_{1}$和 B 点所受阻力$F_{2}$的示意图。
答案:
1. 如图所示
1. 如图所示
解析:
【分析】
这是一道杠杆作图题,我们可以按照清晰的两步思路完成作图:
1. 绘制动力臂l₁:首先明确支点为O,动力臂的定义是支点到动力作用线的垂直距离。第一步先将动力F₁的作用线沿箭头方向适当延长,第二步从支点O向F₁的作用线作垂线,这条垂线段就是动力臂,最后标注上l₁即可。
2. 绘制B点的阻力F₂:动力F₁向上抬A点时,杠杆绕O点转动,B点会向下运动,阻力的作用是阻碍B点的运动,因此B点受到的活塞杆的阻力方向是竖直向上,作用点在B点,沿该方向画出带箭头的力并标注F₂即可。
【解析】
1. 动力臂绘制:将F₁的作用线沿竖直向上方向延长,从支点O向该延长线作垂直的线段,标注垂足,该垂线段即为动力臂l₁。
2. 阻力绘制:在B点处,沿竖直向上的方向画出带箭头的线段,代表阻碍B点向下运动的阻力F₂,标注F₂符号。
【答案】
【知识点】
力臂的画法,杠杆五要素
【点评】
本题属于杠杆基础作图题,核心考查杠杆相关作图的规范要求,易错点是容易误将阻力方向画为向下,需要结合杠杆的转动趋势判断阻力的方向,画力臂时要注意标注垂直符号和对应的力臂标识,避免作图不规范丢分。
【难度系数】
0.7
这是一道杠杆作图题,我们可以按照清晰的两步思路完成作图:
1. 绘制动力臂l₁:首先明确支点为O,动力臂的定义是支点到动力作用线的垂直距离。第一步先将动力F₁的作用线沿箭头方向适当延长,第二步从支点O向F₁的作用线作垂线,这条垂线段就是动力臂,最后标注上l₁即可。
2. 绘制B点的阻力F₂:动力F₁向上抬A点时,杠杆绕O点转动,B点会向下运动,阻力的作用是阻碍B点的运动,因此B点受到的活塞杆的阻力方向是竖直向上,作用点在B点,沿该方向画出带箭头的力并标注F₂即可。
【解析】
1. 动力臂绘制:将F₁的作用线沿竖直向上方向延长,从支点O向该延长线作垂直的线段,标注垂足,该垂线段即为动力臂l₁。
2. 阻力绘制:在B点处,沿竖直向上的方向画出带箭头的线段,代表阻碍B点向下运动的阻力F₂,标注F₂符号。
【答案】
【知识点】
力臂的画法,杠杆五要素
【点评】
本题属于杠杆基础作图题,核心考查杠杆相关作图的规范要求,易错点是容易误将阻力方向画为向下,需要结合杠杆的转动趋势判断阻力的方向,画力臂时要注意标注垂直符号和对应的力臂标识,避免作图不规范丢分。
【难度系数】
0.7
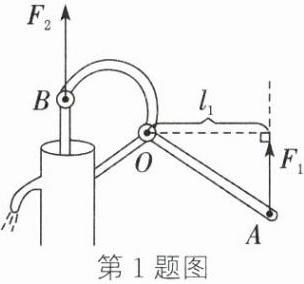
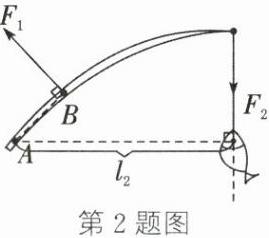
2 如图所示,请在A、B中选取最为合理的一点作为支点,画出拉起鱼竿的最小动力$F_{1}$及阻力$F_{2}$的力臂$l_{2}$。
答案:
2. 如图所示
2. 如图所示
解析:
【分析】
要完成该作图,我们可以按照以下思路逐步推导:
1. 首先明确杠杆平衡条件:动力×动力臂=阻力×阻力臂(F₁L₁=F₂L₂),在阻力大小、阻力臂长度固定的前提下,动力臂越长,所需的动力就越小,要得到最小动力就需要先获得最大的动力臂。
2. 选择合理支点:钓鱼操作时,A点是人手握持的固定支撑点,若选A作为支点,可获得比选B作为支点时更长的动力臂,能满足最小动力的设计要求,因此支点选A。
3. 确定最大动力臂:支点A到杠杆上可施加动力的最远点B的连线就是最长的动力臂,让动力方向垂直于该动力臂(也就是垂直于鱼竿向上),此时动力最小。
4. 绘制阻力臂:力臂是支点到力的作用线的垂直距离,只需要从支点A向阻力F₂的竖直向下作用线作垂线段,就得到阻力臂l₂。
【解析】
1. 确定支点:选取A点为杠杆的支点,该点是钓鱼时人手的固定支撑位置,符合实际使用场景。
2. 绘制最小动力F₁:根据杠杆平衡条件,要动力最小则动力臂需最大,最长动力臂为支点A到动力作用点B的连线,因此过B点作垂直于鱼竿、方向向上的力,即为最小动力F₁。
3. 绘制阻力臂l₂:阻力F₂方向竖直向下,从支点A向F₂的作用线作垂线,支点A到垂足的垂线段就是阻力F₂的力臂l₂。
【答案】
【知识点】
杠杆平衡条件,力臂作图,最小力推导
【点评】
本题是杠杆作图的经典考题,核心考察最小动力的推导逻辑,易错点集中在支点选择错误、动力方向未垂直于最长动力臂,同学们要牢记找最小力的核心方法:先确定合理支点,找到支点到杠杆上最远作用点的连线作为最大动力臂,对应动力垂直于该连线即可。
【难度系数】
0.5
要完成该作图,我们可以按照以下思路逐步推导:
1. 首先明确杠杆平衡条件:动力×动力臂=阻力×阻力臂(F₁L₁=F₂L₂),在阻力大小、阻力臂长度固定的前提下,动力臂越长,所需的动力就越小,要得到最小动力就需要先获得最大的动力臂。
2. 选择合理支点:钓鱼操作时,A点是人手握持的固定支撑点,若选A作为支点,可获得比选B作为支点时更长的动力臂,能满足最小动力的设计要求,因此支点选A。
3. 确定最大动力臂:支点A到杠杆上可施加动力的最远点B的连线就是最长的动力臂,让动力方向垂直于该动力臂(也就是垂直于鱼竿向上),此时动力最小。
4. 绘制阻力臂:力臂是支点到力的作用线的垂直距离,只需要从支点A向阻力F₂的竖直向下作用线作垂线段,就得到阻力臂l₂。
【解析】
1. 确定支点:选取A点为杠杆的支点,该点是钓鱼时人手的固定支撑位置,符合实际使用场景。
2. 绘制最小动力F₁:根据杠杆平衡条件,要动力最小则动力臂需最大,最长动力臂为支点A到动力作用点B的连线,因此过B点作垂直于鱼竿、方向向上的力,即为最小动力F₁。
3. 绘制阻力臂l₂:阻力F₂方向竖直向下,从支点A向F₂的作用线作垂线,支点A到垂足的垂线段就是阻力F₂的力臂l₂。
【答案】
【知识点】
杠杆平衡条件,力臂作图,最小力推导
【点评】
本题是杠杆作图的经典考题,核心考察最小动力的推导逻辑,易错点集中在支点选择错误、动力方向未垂直于最长动力臂,同学们要牢记找最小力的核心方法:先确定合理支点,找到支点到杠杆上最远作用点的连线作为最大动力臂,对应动力垂直于该连线即可。
【难度系数】
0.5
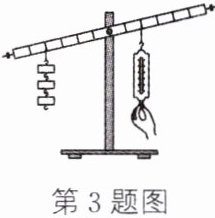
3 如图所示是小华做“探究杠杆平衡条件”实验时的情形,下列操作可能使杠杆在水平位置平衡的是(
A.增加钩码的个数
B.向左调节平衡螺母
C.向右移动钩码
D.减小弹簧测力计的拉力
C
)A.增加钩码的个数
B.向左调节平衡螺母
C.向右移动钩码
D.减小弹簧测力计的拉力
答案:3. C
解析:
【分析】
首先观察题图状态,当前杠杆左端下沉、右端上翘,说明左侧钩码的重力与对应力臂的乘积,大于右侧弹簧测力计拉力与对应力臂的乘积。首先明确核心规则:实验进行过程中,平衡螺母仅能在实验前杠杆未挂钩码时用于调平,实验过程中不能调节平衡螺母。要让杠杆在水平位置平衡,要么减小左侧的力×力臂的数值,要么增大右侧的力×力臂的数值,对照选项逐一判断即可。
【解析】
设每个钩码重力为G,杠杆每格长度为L,此时左侧受力F₁=3G,对应力臂L₁=4L;右侧弹簧测力计拉力为F₂,对应力臂L₂=3L,当前杠杆左低右高,满足3G×4L > F₂×3L。
对各选项逐一分析:
A. 增加钩码个数,左侧F₁进一步变大,左侧力与力臂的乘积会继续增大,杠杆左端会更加下沉,无法实现平衡,A错误;
B. 该操作是实验过程中,杠杆已经悬挂钩码、施加了拉力,不能调节平衡螺母,平衡螺母仅在实验前调平使用,B错误;
C. 向右移动钩码,左侧的力臂L₁会减小,左侧F₁L₁的数值随之降低,可满足F₁L₁=F₂L₂,让杠杆在水平位置平衡,C正确;
D. 减小弹簧测力计的拉力,右侧F₂进一步变小,右侧力与力臂的乘积继续减小,杠杆右端会更加上翘,无法实现平衡,D错误。
【答案】C
【知识点】杠杆平衡条件
【点评】本题侧重考查杠杆平衡实验的操作细节,易错点是误选B,要牢记实验过程中绝对不能调节平衡螺母,只能通过调整力的大小或力臂的大小让杠杆重新平衡,结合杠杆平衡条件逐一排除错误选项即可得到正确结论。
【难度系数】0.7
首先观察题图状态,当前杠杆左端下沉、右端上翘,说明左侧钩码的重力与对应力臂的乘积,大于右侧弹簧测力计拉力与对应力臂的乘积。首先明确核心规则:实验进行过程中,平衡螺母仅能在实验前杠杆未挂钩码时用于调平,实验过程中不能调节平衡螺母。要让杠杆在水平位置平衡,要么减小左侧的力×力臂的数值,要么增大右侧的力×力臂的数值,对照选项逐一判断即可。
【解析】
设每个钩码重力为G,杠杆每格长度为L,此时左侧受力F₁=3G,对应力臂L₁=4L;右侧弹簧测力计拉力为F₂,对应力臂L₂=3L,当前杠杆左低右高,满足3G×4L > F₂×3L。
对各选项逐一分析:
A. 增加钩码个数,左侧F₁进一步变大,左侧力与力臂的乘积会继续增大,杠杆左端会更加下沉,无法实现平衡,A错误;
B. 该操作是实验过程中,杠杆已经悬挂钩码、施加了拉力,不能调节平衡螺母,平衡螺母仅在实验前调平使用,B错误;
C. 向右移动钩码,左侧的力臂L₁会减小,左侧F₁L₁的数值随之降低,可满足F₁L₁=F₂L₂,让杠杆在水平位置平衡,C正确;
D. 减小弹簧测力计的拉力,右侧F₂进一步变小,右侧力与力臂的乘积继续减小,杠杆右端会更加上翘,无法实现平衡,D错误。
【答案】C
【知识点】杠杆平衡条件
【点评】本题侧重考查杠杆平衡实验的操作细节,易错点是误选B,要牢记实验过程中绝对不能调节平衡螺母,只能通过调整力的大小或力臂的大小让杠杆重新平衡,结合杠杆平衡条件逐一排除错误选项即可得到正确结论。
【难度系数】0.7