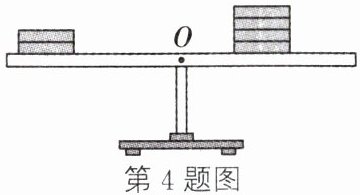
4(易错题)小明制作了一个简易杠杆,调节杠杆在水平位置平衡,然后在它两边恰当位置分别放上不同数量的同种硬币,使其在水平位置再次平衡,如图所示。若两边同时各减少一枚同种硬币,则杠杆将(
A.右端下降
B.左端下降
C.仍然水平平衡
D.无法判断其状态
A
)A.右端下降
B.左端下降
C.仍然水平平衡
D.无法判断其状态
答案:4. A
易错分析
4. 不能认为两边同时各减少一枚同种硬币,杠杆就保持平衡。杠杆是否平衡,决定于力和力臂的乘积。
易错分析
4. 不能认为两边同时各减少一枚同种硬币,杠杆就保持平衡。杠杆是否平衡,决定于力和力臂的乘积。
解析:
【分析】
我们首先要明确杠杆的平衡条件是动力×动力臂=阻力×阻力臂,不能凭直觉认为两边减少相同数量的硬币杠杆就依然平衡。首先先设单枚硬币重力为G,利用初始平衡状态推导出左右两侧力臂的大小关系,之后再计算各减去一枚硬币后两侧的力与力臂的乘积,对比两个乘积的大小,乘积更大的一侧会向下倾斜,就能得到杠杆的状态了。
【解析】
解:设每枚硬币的重力为G,初始状态下左侧2枚硬币的力臂为$L_1$,右侧4枚硬币的力臂为$L_2$。
1. 初始杠杆水平平衡,根据杠杆平衡条件$F_1L_1=F_2L_2$,代入已知条件得:
$2G × L_1 = 4G × L_2$
约去G后化简可得:$L_1=2L_2$
2. 两侧同时各减少1枚硬币后,左侧剩余硬币总重力为$G$,右侧剩余硬币总重力为$3G$,分别计算两侧力与力臂的乘积:
左侧:$F_1'L_1 = G × L_1 = G × 2L_2 = 2GL_2$
右侧:$F_2'L_2 = 3G × L_2 = 3GL_2$
3. 对比两侧乘积:$3GL_2 > 2GL_2$,右侧力与力臂的乘积更大,因此杠杆右端会向下倾斜。
【答案】A
【知识点】杠杆平衡条件
【点评】本题属于易错题,很多同学会错误认为两侧减少相同重力的物体,杠杆就会保持平衡,忽略了杠杆平衡的核心是力和力臂的乘积相等,本题两侧初始力臂并不相等,减去相同的力后,两侧乘积的变化量不同,最终乘积更大的右侧下沉,解题时要严格按照杠杆平衡条件计算,避免凭主观直觉判断。
【难度系数】0.6
我们首先要明确杠杆的平衡条件是动力×动力臂=阻力×阻力臂,不能凭直觉认为两边减少相同数量的硬币杠杆就依然平衡。首先先设单枚硬币重力为G,利用初始平衡状态推导出左右两侧力臂的大小关系,之后再计算各减去一枚硬币后两侧的力与力臂的乘积,对比两个乘积的大小,乘积更大的一侧会向下倾斜,就能得到杠杆的状态了。
【解析】
解:设每枚硬币的重力为G,初始状态下左侧2枚硬币的力臂为$L_1$,右侧4枚硬币的力臂为$L_2$。
1. 初始杠杆水平平衡,根据杠杆平衡条件$F_1L_1=F_2L_2$,代入已知条件得:
$2G × L_1 = 4G × L_2$
约去G后化简可得:$L_1=2L_2$
2. 两侧同时各减少1枚硬币后,左侧剩余硬币总重力为$G$,右侧剩余硬币总重力为$3G$,分别计算两侧力与力臂的乘积:
左侧:$F_1'L_1 = G × L_1 = G × 2L_2 = 2GL_2$
右侧:$F_2'L_2 = 3G × L_2 = 3GL_2$
3. 对比两侧乘积:$3GL_2 > 2GL_2$,右侧力与力臂的乘积更大,因此杠杆右端会向下倾斜。
【答案】A
【知识点】杠杆平衡条件
【点评】本题属于易错题,很多同学会错误认为两侧减少相同重力的物体,杠杆就会保持平衡,忽略了杠杆平衡的核心是力和力臂的乘积相等,本题两侧初始力臂并不相等,减去相同的力后,两侧乘积的变化量不同,最终乘积更大的右侧下沉,解题时要严格按照杠杆平衡条件计算,避免凭主观直觉判断。
【难度系数】0.6
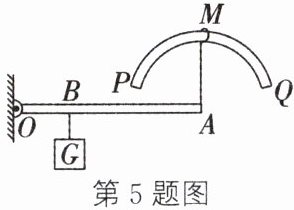
5 如图所示,在杠杆$OA$的$B$处悬挂一个重物$G$,$A$端用细绳吊在小圆环$M$的下面,且细绳长$AM$等于圆弧环$PQ$的半径,此时杠杆恰处于水平状态,$A$点与圆弧环$PQ$的圆心重合。在小圆环$M$从$P$点逐渐沿顺时针方向滑到$Q$点的过程中,细绳对$A$端的作用力大小(
A.逐渐变大
B.逐渐变小
C.先变大后变小
D.先变小后变大
D
)A.逐渐变大
B.逐渐变小
C.先变大后变小
D.先变小后变大
答案:5. D
解析:
【分析】
首先我们先明确该杠杆的支点为O,杠杆受到的阻力是重物G的拉力,阻力臂是OB,这两个量在圆环滑动的全过程中都保持不变,因此阻力与阻力臂的乘积G·OB是定值。接下来分析细绳对A端拉力的力臂:题目给出A点与圆弧环PQ的圆心重合,且细绳长AM等于圆弧环PQ的半径,因此当小圆环M沿圆弧从P顺时针滑到Q的过程中,拉力的方向始终沿AM指向M,支点O到拉力作用线的垂直距离也就是拉力的力臂,会先逐渐变大,当AM方向与水平的杠杆OA垂直时,拉力的力臂达到最大值(等于OA的长度),之后随着M继续向Q滑动,拉力的力臂又会逐渐变小。结合杠杆平衡条件,动力也就是细绳拉力和动力臂成反比,因此拉力的大小会先变小后变大。
【解析】
1. 确定杠杆的恒定参数:支点为O,阻力等于重物G的重力,阻力臂为OB,由题意可知G和OB均不随圆环滑动改变,因此阻力×阻力臂 = G·OB 为固定值。
2. 分析拉力的力臂变化规律:由于A是圆弧PQ的圆心,AM长度等于圆弧半径,M在圆弧上滑动时,细绳拉力的作用线始终为AM所在直线,支点O到该作用线的垂直距离即动力臂:
M从P向圆弧最高点滑动时,动力臂逐渐增大;
当AM垂直于水平杠杆OA时,动力臂长度等于OA,达到最大值;
M从圆弧最高点向Q滑动时,动力臂逐渐减小。
3. 代入杠杆平衡公式 $ F_1L_1=F_2L_2 $,可得细绳拉力 $ F_{拉} = \frac{G· OB}{L_{动}} $,因此拉力随动力臂先增后减的变化,整体表现为先变小后变大。
【答案】D
【知识点】杠杆平衡条件,力臂的判断
【点评】本题属于杠杆动态变化的易错题,核心考点是准确判断拉力力臂的变化趋势,很多同学容易忽略A是圆弧圆心的特殊条件,错误判断力臂的变化规律,解题时只要抓住阻力和阻力臂乘积不变的前提,梳理清楚支点到拉力作用线的垂直距离的变化过程,就能快速推导拉力的变化情况。
【难度系数】0.5
首先我们先明确该杠杆的支点为O,杠杆受到的阻力是重物G的拉力,阻力臂是OB,这两个量在圆环滑动的全过程中都保持不变,因此阻力与阻力臂的乘积G·OB是定值。接下来分析细绳对A端拉力的力臂:题目给出A点与圆弧环PQ的圆心重合,且细绳长AM等于圆弧环PQ的半径,因此当小圆环M沿圆弧从P顺时针滑到Q的过程中,拉力的方向始终沿AM指向M,支点O到拉力作用线的垂直距离也就是拉力的力臂,会先逐渐变大,当AM方向与水平的杠杆OA垂直时,拉力的力臂达到最大值(等于OA的长度),之后随着M继续向Q滑动,拉力的力臂又会逐渐变小。结合杠杆平衡条件,动力也就是细绳拉力和动力臂成反比,因此拉力的大小会先变小后变大。
【解析】
1. 确定杠杆的恒定参数:支点为O,阻力等于重物G的重力,阻力臂为OB,由题意可知G和OB均不随圆环滑动改变,因此阻力×阻力臂 = G·OB 为固定值。
2. 分析拉力的力臂变化规律:由于A是圆弧PQ的圆心,AM长度等于圆弧半径,M在圆弧上滑动时,细绳拉力的作用线始终为AM所在直线,支点O到该作用线的垂直距离即动力臂:
M从P向圆弧最高点滑动时,动力臂逐渐增大;
当AM垂直于水平杠杆OA时,动力臂长度等于OA,达到最大值;
M从圆弧最高点向Q滑动时,动力臂逐渐减小。
3. 代入杠杆平衡公式 $ F_1L_1=F_2L_2 $,可得细绳拉力 $ F_{拉} = \frac{G· OB}{L_{动}} $,因此拉力随动力臂先增后减的变化,整体表现为先变小后变大。
【答案】D
【知识点】杠杆平衡条件,力臂的判断
【点评】本题属于杠杆动态变化的易错题,核心考点是准确判断拉力力臂的变化趋势,很多同学容易忽略A是圆弧圆心的特殊条件,错误判断力臂的变化规律,解题时只要抓住阻力和阻力臂乘积不变的前提,梳理清楚支点到拉力作用线的垂直距离的变化过程,就能快速推导拉力的变化情况。
【难度系数】0.5
6 用如图所示的开瓶扳手开瓶盖,A、B 两点中
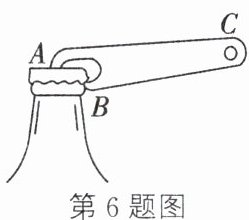
A
点是支点,开瓶盖时在 C 点处施加向上
(向上/向下)的力,开瓶扳手是省力
(省力/等臂/费力)杠杆。答案:6. A 向上 省力
解析:
【分析】
我们可以按照杠杆相关概念逐步推导:首先第一步找支点,支点是杠杆工作时绕着转动的固定点,使用开瓶扳手时,A点始终抵在瓶盖顶端,整个扳手围绕A点转动,因此先确定支点位置。第二步判断力的方向,B点卡在瓶盖的下边缘,要把瓶盖向上撬开,就需要让B点向上运动,因此在C点施加向上的力就能带动B点顶开瓶盖。第三步判断杠杆类型,对比支点到动力作用线、支点到阻力作用线的长度,也就是动力臂和阻力臂的大小,就能确定杠杆的分类。
【解析】
1. 支点判断:开瓶盖的过程中,开瓶扳手始终绕A点转动,因此A点是支点。
2. 施力方向判断:瓶盖对B点的阻力方向向下,要克服阻力将瓶盖撬开,在C点施加向上的力即可实现撬动效果。
3. 杠杆分类:该杠杆的动力臂长度大于阻力臂长度,根据杠杆平衡条件$F_1L_1=F_2L_2$,此时动力小于阻力,因此开瓶扳手属于省力杠杆。
【答案】
A 向上 省力
【知识点】
杠杆支点判断,杠杆分类
【点评】
本题结合生活中常见的开瓶扳手场景考察杠杆基础知识点,解题核心是结合实际使用过程确定支点位置,再通过力臂的长短关系判断杠杆类型,属于杠杆部分的典型基础应用题。
【难度系数】
0.8
我们可以按照杠杆相关概念逐步推导:首先第一步找支点,支点是杠杆工作时绕着转动的固定点,使用开瓶扳手时,A点始终抵在瓶盖顶端,整个扳手围绕A点转动,因此先确定支点位置。第二步判断力的方向,B点卡在瓶盖的下边缘,要把瓶盖向上撬开,就需要让B点向上运动,因此在C点施加向上的力就能带动B点顶开瓶盖。第三步判断杠杆类型,对比支点到动力作用线、支点到阻力作用线的长度,也就是动力臂和阻力臂的大小,就能确定杠杆的分类。
【解析】
1. 支点判断:开瓶盖的过程中,开瓶扳手始终绕A点转动,因此A点是支点。
2. 施力方向判断:瓶盖对B点的阻力方向向下,要克服阻力将瓶盖撬开,在C点施加向上的力即可实现撬动效果。
3. 杠杆分类:该杠杆的动力臂长度大于阻力臂长度,根据杠杆平衡条件$F_1L_1=F_2L_2$,此时动力小于阻力,因此开瓶扳手属于省力杠杆。
【答案】
A 向上 省力
【知识点】
杠杆支点判断,杠杆分类
【点评】
本题结合生活中常见的开瓶扳手场景考察杠杆基础知识点,解题核心是结合实际使用过程确定支点位置,再通过力臂的长短关系判断杠杆类型,属于杠杆部分的典型基础应用题。
【难度系数】
0.8
7 新趋势 学科融合 [2024 河南]人体中有很多结构可简化为杠杆。如图所示,手提起物体时,桡骨在肱二头肌的收缩牵引下绕肘关节转动,这是一种
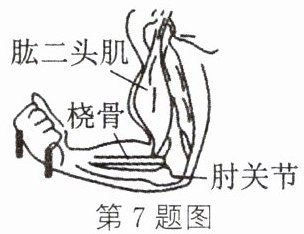
费力
杠杆,此过程中肱二头肌收缩的距离小于
(大于/等于/小于)手移动的距离。答案:7. 费力 小于
解析:
【分析】
解题时首先要明确该杠杆的相关要素:第一步先找到杠杆的支点,也就是图中的肘关节;第二步确定动力是肱二头肌对桡骨的牵引力,阻力是手和所提重物的总重力;接下来对比动力臂(支点到肱二头肌拉力作用线的距离)和阻力臂(支点到重物重力作用线的距离)的长度,可发现动力臂远小于阻力臂,由此判断杠杆类型。再结合不同类型杠杆的运动距离特点,就能判断肱二头肌收缩距离和手移动距离的大小关系。
【解析】
1. 确定杠杆要素:该杠杆的支点为肘关节,动力为肱二头肌收缩产生的拉力,阻力为手及所提物体的总重力。
2. 对比力臂大小:动力臂是支点到动力作用线的距离,阻力臂是支点到阻力作用线的距离,此处动力臂明显小于阻力臂。
3. 判断杠杆类型:根据杠杆平衡条件$F_1L_1=F_2L_2$,动力臂小于阻力臂时,动力大于阻力,属于费力杠杆。
4. 判断移动距离:费力杠杆的特点是费力但省距离,即动力作用点移动的距离小于阻力作用点移动的距离,因此肱二头肌收缩的距离小于手移动的距离。
【答案】
费力;小于
【知识点】
杠杆分类;杠杆平衡条件;费力杠杆特性
【点评】
本题属于物理与生物的跨学科融合题型,将人体手臂的运动简化为杠杆模型,贴合生活实际,解题核心是准确识别杠杆的支点、动力、阻力,通过力臂大小关系判断杠杆类型,再结合杠杆的运动特性分析距离关系,引导学生学会用物理知识解释人体生理活动中的物理原理。
【难度系数】
0.7
解题时首先要明确该杠杆的相关要素:第一步先找到杠杆的支点,也就是图中的肘关节;第二步确定动力是肱二头肌对桡骨的牵引力,阻力是手和所提重物的总重力;接下来对比动力臂(支点到肱二头肌拉力作用线的距离)和阻力臂(支点到重物重力作用线的距离)的长度,可发现动力臂远小于阻力臂,由此判断杠杆类型。再结合不同类型杠杆的运动距离特点,就能判断肱二头肌收缩距离和手移动距离的大小关系。
【解析】
1. 确定杠杆要素:该杠杆的支点为肘关节,动力为肱二头肌收缩产生的拉力,阻力为手及所提物体的总重力。
2. 对比力臂大小:动力臂是支点到动力作用线的距离,阻力臂是支点到阻力作用线的距离,此处动力臂明显小于阻力臂。
3. 判断杠杆类型:根据杠杆平衡条件$F_1L_1=F_2L_2$,动力臂小于阻力臂时,动力大于阻力,属于费力杠杆。
4. 判断移动距离:费力杠杆的特点是费力但省距离,即动力作用点移动的距离小于阻力作用点移动的距离,因此肱二头肌收缩的距离小于手移动的距离。
【答案】
费力;小于
【知识点】
杠杆分类;杠杆平衡条件;费力杠杆特性
【点评】
本题属于物理与生物的跨学科融合题型,将人体手臂的运动简化为杠杆模型,贴合生活实际,解题核心是准确识别杠杆的支点、动力、阻力,通过力臂大小关系判断杠杆类型,再结合杠杆的运动特性分析距离关系,引导学生学会用物理知识解释人体生理活动中的物理原理。
【难度系数】
0.7
8 小兰自制了一把杆秤,由秤盘、提纽、秤杆以及200 g的秤砣构成,如图所示。当不挂秤砣、秤盘中不放重物时,提起提纽,秤杆在空中恰好能水平平衡。已知AO间距离为10 cm。当放入重物,将秤砣移至距O点30 cm的B处时,秤杆水平平衡,则重物质量为
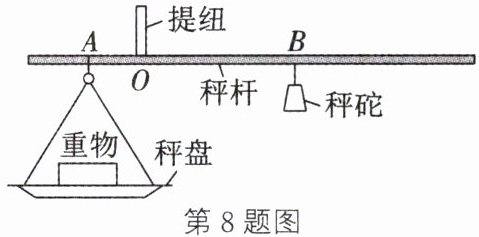
600
g;往秤盘中再增加20 g的物体,秤砣需要从B处向右
(左/右)移动1
cm才能维持秤杆水平平衡。答案:8. 600 右 1
解析:
【分析】
这道题是杠杆平衡条件的实际应用题,首先我们先明确解题思路:首先题目已经说明不放重物、不挂秤砣时秤杆恰好水平平衡,说明秤杆自身重力的力矩已经被完全抵消,后续计算不需要考虑秤杆自重的影响。第一步我们可以直接利用杠杆平衡条件,将重物的重力作为阻力、对应力臂为AO,秤砣的重力作为动力、对应力臂为OB,代入公式就可以算出重物的质量。第二步,当秤盘中增加重物后,左侧的阻力和阻力臂的乘积变大,而秤砣的重力不变,为了维持杠杆平衡,就需要增大右侧的动力臂,因此秤砣要向远离支点O的方向移动,最后对新增的部分单独用杠杆平衡的增量关系,就能快速算出秤砣需要移动的距离。
【解析】
1. 求重物质量:
根据杠杆平衡条件 $F_1L_1=F_2L_2$,可得 $G_{\mathrm{物}} · OA = G_{\mathrm{砣}} · OB$,代入重力公式 $G=mg$ 后约去g,得到:
$m_{\mathrm{物}} · OA = m_{\mathrm{砣}} · OB$
代入已知数值 $OA=10\ \mathrm{cm}$,$m_{\mathrm{砣}}=200\ \mathrm{g}$,$OB=30\ \mathrm{cm}$:
$m_{\mathrm{物}} = \frac{m_{\mathrm{砣}} · OB}{OA} = \frac{200\ \mathrm{g} × 30\ \mathrm{cm}}{10\ \mathrm{cm}} = 600\ \mathrm{g}$
2. 判断秤砣移动方向:
增加20g物体后,左侧的总力矩变大,秤砣重力不变,因此需要增大秤砣对应的力臂,所以秤砣需要从B点向右移动。
3. 计算秤砣移动的距离:
对新增的部分单独列杠杆平衡等式:$\Delta m · g · OA = m_{\mathrm{砣}} · g · \Delta L$,约去g后:
$\Delta L = \frac{\Delta m · OA}{m_{\mathrm{砣}}} = \frac{20\ \mathrm{g} × 10\ \mathrm{cm}}{200\ \mathrm{g}} = 1\ \mathrm{cm}$
【答案】
600;右;1
【知识点】
杠杆平衡条件;杆秤的工作原理
【点评】
本题结合生活中常见的杆秤场景考察杠杆平衡的应用,题目提前说明空载时秤杆平衡,规避了秤杆自重的复杂计算,整体难度适中,使用增量法计算新增重物对应的秤砣移动距离可以大幅简化运算,是杠杆类问题的常用技巧。
【难度系数】
0.7
这道题是杠杆平衡条件的实际应用题,首先我们先明确解题思路:首先题目已经说明不放重物、不挂秤砣时秤杆恰好水平平衡,说明秤杆自身重力的力矩已经被完全抵消,后续计算不需要考虑秤杆自重的影响。第一步我们可以直接利用杠杆平衡条件,将重物的重力作为阻力、对应力臂为AO,秤砣的重力作为动力、对应力臂为OB,代入公式就可以算出重物的质量。第二步,当秤盘中增加重物后,左侧的阻力和阻力臂的乘积变大,而秤砣的重力不变,为了维持杠杆平衡,就需要增大右侧的动力臂,因此秤砣要向远离支点O的方向移动,最后对新增的部分单独用杠杆平衡的增量关系,就能快速算出秤砣需要移动的距离。
【解析】
1. 求重物质量:
根据杠杆平衡条件 $F_1L_1=F_2L_2$,可得 $G_{\mathrm{物}} · OA = G_{\mathrm{砣}} · OB$,代入重力公式 $G=mg$ 后约去g,得到:
$m_{\mathrm{物}} · OA = m_{\mathrm{砣}} · OB$
代入已知数值 $OA=10\ \mathrm{cm}$,$m_{\mathrm{砣}}=200\ \mathrm{g}$,$OB=30\ \mathrm{cm}$:
$m_{\mathrm{物}} = \frac{m_{\mathrm{砣}} · OB}{OA} = \frac{200\ \mathrm{g} × 30\ \mathrm{cm}}{10\ \mathrm{cm}} = 600\ \mathrm{g}$
2. 判断秤砣移动方向:
增加20g物体后,左侧的总力矩变大,秤砣重力不变,因此需要增大秤砣对应的力臂,所以秤砣需要从B点向右移动。
3. 计算秤砣移动的距离:
对新增的部分单独列杠杆平衡等式:$\Delta m · g · OA = m_{\mathrm{砣}} · g · \Delta L$,约去g后:
$\Delta L = \frac{\Delta m · OA}{m_{\mathrm{砣}}} = \frac{20\ \mathrm{g} × 10\ \mathrm{cm}}{200\ \mathrm{g}} = 1\ \mathrm{cm}$
【答案】
600;右;1
【知识点】
杠杆平衡条件;杆秤的工作原理
【点评】
本题结合生活中常见的杆秤场景考察杠杆平衡的应用,题目提前说明空载时秤杆平衡,规避了秤杆自重的复杂计算,整体难度适中,使用增量法计算新增重物对应的秤砣移动距离可以大幅简化运算,是杠杆类问题的常用技巧。
【难度系数】
0.7
9 如图所示,滑轮提升重物时,竖直向上匀速拉动弹簧测力计,可观察到:当重物上升时,滑轮绕轴
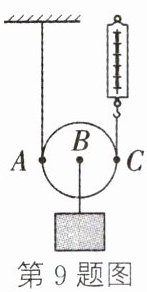
逆
时针转动,该滑轮可视为杠杆的变形,其支点为A
(A/B/C)点。答案:9. 逆 A
解析:
【分析】
首先梳理装置结构:图中是动滑轮,左侧绳子上端固定在天花板,绕过滑轮后右端连接弹簧测力计,滑轮下方悬挂重物。先推导转动方向:当竖直向上匀速拉动弹簧测力计时,滑轮右侧的C点随拉力向上运动,滑轮整体向上抬升重物,左侧A点与固定不动的左侧绳子接触,滑轮向上运动的过程中,右侧向上移动的幅度大于左侧,因此滑轮会绕A点沿逆时针方向转动。再判断杠杆支点:动滑轮的本质是动力臂为阻力臂2倍的省力杠杆,杠杆绕着转动的瞬时固定点就是支点,动滑轮工作时瞬时相对静止的点是左侧固定绳索和滑轮的接触点,也就是A点。
【解析】
1. 转动方向判断:向上拉动弹簧测力计时,滑轮右侧C点向上运动,重物随滑轮同步上升,滑轮左侧A点靠在固定的绳上,滑轮向上运动时右侧向上位移更大,因此滑轮绕轴逆时针转动。
2. 支点判断:动滑轮作为杠杆使用时,杠杆绕其转动的点为左侧固定绳子与滑轮的接触点A,动力作用在C点,阻力作用在滑轮中心的轴上,动力臂等于滑轮直径,阻力臂等于滑轮半径,符合动滑轮的省力特性。
【答案】
逆 A
【知识点】
动滑轮本质;杠杆支点
【点评】
本题跳出对动滑轮的死记硬背,从实际运动和杠杆定义的角度考察对动滑轮原理的理解,纠正学生误以为动滑轮支点在中心轴的常见误区,帮助学生真正掌握动滑轮的工作逻辑。
【难度系数】
0.4
首先梳理装置结构:图中是动滑轮,左侧绳子上端固定在天花板,绕过滑轮后右端连接弹簧测力计,滑轮下方悬挂重物。先推导转动方向:当竖直向上匀速拉动弹簧测力计时,滑轮右侧的C点随拉力向上运动,滑轮整体向上抬升重物,左侧A点与固定不动的左侧绳子接触,滑轮向上运动的过程中,右侧向上移动的幅度大于左侧,因此滑轮会绕A点沿逆时针方向转动。再判断杠杆支点:动滑轮的本质是动力臂为阻力臂2倍的省力杠杆,杠杆绕着转动的瞬时固定点就是支点,动滑轮工作时瞬时相对静止的点是左侧固定绳索和滑轮的接触点,也就是A点。
【解析】
1. 转动方向判断:向上拉动弹簧测力计时,滑轮右侧C点向上运动,重物随滑轮同步上升,滑轮左侧A点靠在固定的绳上,滑轮向上运动时右侧向上位移更大,因此滑轮绕轴逆时针转动。
2. 支点判断:动滑轮作为杠杆使用时,杠杆绕其转动的点为左侧固定绳子与滑轮的接触点A,动力作用在C点,阻力作用在滑轮中心的轴上,动力臂等于滑轮直径,阻力臂等于滑轮半径,符合动滑轮的省力特性。
【答案】
逆 A
【知识点】
动滑轮本质;杠杆支点
【点评】
本题跳出对动滑轮的死记硬背,从实际运动和杠杆定义的角度考察对动滑轮原理的理解,纠正学生误以为动滑轮支点在中心轴的常见误区,帮助学生真正掌握动滑轮的工作逻辑。
【难度系数】
0.4
10 同一个物体分别用图中甲、乙两个滑轮组吊着,则
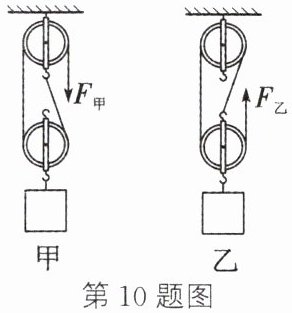
乙
(甲/乙)滑轮组更省力,甲
(甲/乙)滑轮组能改变用力的方向;若物体重为300 N,动滑轮重为30 N,把物体提升1 m,则甲滑轮组中绳自由端移动距离$s_甲=$2
m,乙滑轮组中拉力$F_乙=$110
N。(不计绳重和摩擦)答案:10. 乙 甲 2 110
解析:
【分析】
解这道题的核心思路是先正确数出两个滑轮组中承担动滑轮和物重的绳子段数n:首先,滑轮组的省力程度由n决定,n越大拉力越小、越省力;其次判断能否改变用力方向,只需要对比绳自由端的拉力方向和物体上升的运动方向是否不同,方向不同就说明可以改变用力方向;最后再代入滑轮组的距离公式s=nh、不计绳重摩擦时的拉力公式F=(G物+G动)/n计算对应物理量即可。先数甲的n:动滑轮上共有2段绳子,拉力方向向下,和物体向上运动的方向相反;乙的n是3段,拉力方向向上,和物体运动方向一致,后续代入数值就能得到结果。
【解析】
1. 省力情况判断:不计绳重和摩擦,滑轮组拉力公式为$F=\frac{G_{物}+G_{动}}{n}$,甲滑轮组承担总重的绳子段数$n_甲=2$,乙滑轮组$n_乙=3$,n越大拉力越小,因此乙滑轮组更省力。
2. 改变用力方向判断:甲滑轮组拉力方向向下,被提升的物体运动方向向上,二者方向不同,因此甲滑轮组可以改变用力的方向;乙滑轮组拉力方向向上,和物体上升方向一致,无法改变用力方向。
3. 甲绳端移动距离计算:根据滑轮组距离关系$s=nh$,已知提升高度h=1m,$n_甲=2$,因此$s_甲=2×1m=2m$。
4. 乙的拉力计算:代入不计绳重摩擦的拉力公式,$F_乙=\frac{G_{物}+G_{动}}{n_乙}=\frac{300N+30N}{3}=110N$。
【答案】乙;甲;2;110
【知识点】滑轮组省力判断;滑轮组距离计算
【点评】本题属于滑轮组的基础常规题型,重点考察学生对滑轮组核心特点的掌握,只要能正确数出承担动滑轮的绳子段数n,区分省力特性和改向特性,代入对应公式即可顺利求解,易错点是误将乙图的绳子段数错数为2,导致计算错误。
【难度系数】
0.8
解这道题的核心思路是先正确数出两个滑轮组中承担动滑轮和物重的绳子段数n:首先,滑轮组的省力程度由n决定,n越大拉力越小、越省力;其次判断能否改变用力方向,只需要对比绳自由端的拉力方向和物体上升的运动方向是否不同,方向不同就说明可以改变用力方向;最后再代入滑轮组的距离公式s=nh、不计绳重摩擦时的拉力公式F=(G物+G动)/n计算对应物理量即可。先数甲的n:动滑轮上共有2段绳子,拉力方向向下,和物体向上运动的方向相反;乙的n是3段,拉力方向向上,和物体运动方向一致,后续代入数值就能得到结果。
【解析】
1. 省力情况判断:不计绳重和摩擦,滑轮组拉力公式为$F=\frac{G_{物}+G_{动}}{n}$,甲滑轮组承担总重的绳子段数$n_甲=2$,乙滑轮组$n_乙=3$,n越大拉力越小,因此乙滑轮组更省力。
2. 改变用力方向判断:甲滑轮组拉力方向向下,被提升的物体运动方向向上,二者方向不同,因此甲滑轮组可以改变用力的方向;乙滑轮组拉力方向向上,和物体上升方向一致,无法改变用力方向。
3. 甲绳端移动距离计算:根据滑轮组距离关系$s=nh$,已知提升高度h=1m,$n_甲=2$,因此$s_甲=2×1m=2m$。
4. 乙的拉力计算:代入不计绳重摩擦的拉力公式,$F_乙=\frac{G_{物}+G_{动}}{n_乙}=\frac{300N+30N}{3}=110N$。
【答案】乙;甲;2;110
【知识点】滑轮组省力判断;滑轮组距离计算
【点评】本题属于滑轮组的基础常规题型,重点考察学生对滑轮组核心特点的掌握,只要能正确数出承担动滑轮的绳子段数n,区分省力特性和改向特性,代入对应公式即可顺利求解,易错点是误将乙图的绳子段数错数为2,导致计算错误。
【难度系数】
0.8