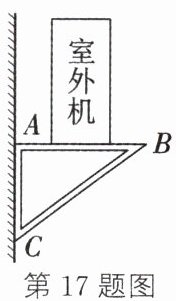
17 如图所示,用固定在墙上的三角支架 ABC 放置空调室外机。若 A 处的螺钉松脱,则支架会绕
中点处,则 A 处螺钉的水平拉力为
尽量
C
点倾翻。已知 AB 长为 40 cm,AC 长为 30 cm。室外机的重力为 300 N,正好处在 AB中点处,则 A 处螺钉的水平拉力为
200
N(支架重力忽略不计)。为了安全,室外机的位置应尽量
靠近
(靠近/远离)墙壁。答案:17. C 200 靠近
解析:
【分析】
首先第一步判断倾翻支点:当A处螺钉松脱时,支架仅剩余C点和墙面固定,失去A的约束后支架会绕C点转动倾翻。接下来将三角支架抽象为以C为支点的杠杆,忽略支架自重,A处螺钉的水平拉力为动力,动力臂为AC的长度;室外机的重力为阻力,阻力臂是支点C到重力作用线的水平距离,也就是AB长度的一半,代入杠杆平衡公式即可算出拉力大小。最后分析安全优化:在室外机重力、动力臂AC都不变的前提下,减小阻力臂就能降低A处螺钉的受力,因此让室外机靠近墙壁就可以缩短阻力臂,提升安全性。
【解析】
1. 支点判断:A处螺钉松脱后,三角支架与墙面的连接点仅剩C点,支架会绕C点发生转动倾翻,因此第一空填C。
2. 拉力计算:以C为支点,根据杠杆平衡条件 $ F_1L_1=F_2L_2 $,可得:
$ F × L_{AC} = G × \frac{1}{2}L_{AB} $
代入已知数值 $ L_{AC}=30\ \mathrm{cm} $,$ G=300\ \mathrm{N} $,$ L_{AB}=40\ \mathrm{cm} $:
$ F × 30\ \mathrm{cm} = 300\ \mathrm{N} × 20\ \mathrm{cm} $
解得 $ F=200\ \mathrm{N} $。
3. 安全分析:根据杠杆平衡规律,室外机重力G、动力臂AC不变时,室外机越靠近墙壁,重力对应的阻力臂越小,A处螺钉受到的水平拉力就越小,支架越不容易损坏,因此第三空填靠近。
【答案】C 200 靠近
【知识点】杠杆支点判断,杠杆平衡条件
【点评】本题结合生活中空调外机支架的真实场景考查杠杆的实际应用,核心考点是正确识别杠杆的支点、动力臂和阻力臂,避免出现支点判断错误的问题,通过生活化的情境强化学生对杠杆平衡规律的理解和运用能力。
【难度系数】0.7
首先第一步判断倾翻支点:当A处螺钉松脱时,支架仅剩余C点和墙面固定,失去A的约束后支架会绕C点转动倾翻。接下来将三角支架抽象为以C为支点的杠杆,忽略支架自重,A处螺钉的水平拉力为动力,动力臂为AC的长度;室外机的重力为阻力,阻力臂是支点C到重力作用线的水平距离,也就是AB长度的一半,代入杠杆平衡公式即可算出拉力大小。最后分析安全优化:在室外机重力、动力臂AC都不变的前提下,减小阻力臂就能降低A处螺钉的受力,因此让室外机靠近墙壁就可以缩短阻力臂,提升安全性。
【解析】
1. 支点判断:A处螺钉松脱后,三角支架与墙面的连接点仅剩C点,支架会绕C点发生转动倾翻,因此第一空填C。
2. 拉力计算:以C为支点,根据杠杆平衡条件 $ F_1L_1=F_2L_2 $,可得:
$ F × L_{AC} = G × \frac{1}{2}L_{AB} $
代入已知数值 $ L_{AC}=30\ \mathrm{cm} $,$ G=300\ \mathrm{N} $,$ L_{AB}=40\ \mathrm{cm} $:
$ F × 30\ \mathrm{cm} = 300\ \mathrm{N} × 20\ \mathrm{cm} $
解得 $ F=200\ \mathrm{N} $。
3. 安全分析:根据杠杆平衡规律,室外机重力G、动力臂AC不变时,室外机越靠近墙壁,重力对应的阻力臂越小,A处螺钉受到的水平拉力就越小,支架越不容易损坏,因此第三空填靠近。
【答案】C 200 靠近
【知识点】杠杆支点判断,杠杆平衡条件
【点评】本题结合生活中空调外机支架的真实场景考查杠杆的实际应用,核心考点是正确识别杠杆的支点、动力臂和阻力臂,避免出现支点判断错误的问题,通过生活化的情境强化学生对杠杆平衡规律的理解和运用能力。
【难度系数】0.7
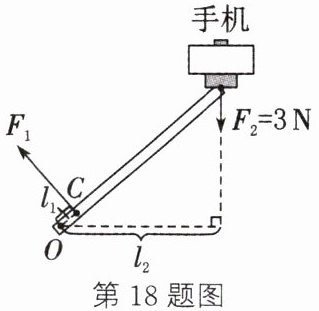
18 如图所示是使用手机和自拍杆自拍时的示意图,自拍杆可以看作一个
费力
(省力/费力)杠杆($O$ 为支点)。已知自拍杆长为 1 m(质量忽略不计),手机对杆竖直向下的作用力 $F_2=3\ \mathrm{N},$ 图中$l_1=10\ \mathrm{cm}$、$l_2=80\ \mathrm{cm},$ 则手垂直于杆的动力 $F_1=\_\_\_\_\_\_\mathrm{N},$ 拍摄需要伸长自拍杆时,若保持 $F_1$的作用点、方向及支点位置不变,则 $F_1$ 大小将变大
(变大/变小)。答案:18. 费力 24 变大
解析:
【分析】
首先判断杠杆类型,先确定支点O,对比动力臂和阻力臂的长度:动力臂l₁=10cm,阻力臂l₂=80cm,动力臂小于阻力臂,由此可判断杠杆类别;接着利用杠杆平衡条件F₁l₁=F₂l₂,代入已知的F₂、l₁、l₂数值,即可计算出动力F₁的大小;最后分析伸长自拍杆的动态场景:阻力F₂不变,动力的作用点、方向、支点都不变,因此动力臂l₁保持不变,而阻力臂会随杆伸长而增大,再结合杠杆平衡条件就能推导F₁的变化趋势。
【解析】
1. 杠杆类型判断:以O为支点,动力臂l₁=10cm,阻力臂l₂=80cm,动力臂小于阻力臂,因此自拍杆属于费力杠杆。
2. 计算动力F₁:根据杠杆平衡条件$F_1l_1=F_2l_2$,代入已知数据:
$F_1 × 10\ \mathrm{cm} = 3\ \mathrm{N} × 80\ \mathrm{cm}$,解得$F_1=\frac{3\ \mathrm{N} × 80\ \mathrm{cm}}{10\ \mathrm{cm}}=24\ \mathrm{N}$。
3. 动态变化分析:伸长自拍杆时,阻力F₂始终等于手机重力保持不变,动力F₁的作用点、方向、支点位置均不变,因此动力臂l₁大小不变,而阻力臂会随自拍杆伸长而变大,由杠杆平衡条件可得,F₁的大小将变大。
【答案】
费力 24 变大
【知识点】
杠杆分类,杠杆平衡条件
【点评】
本题结合生活中自拍杆的实际场景考查杠杆相关知识,属于基础应用型题目,易错点是动态变化的推导,只要明确阻力臂随杆伸长增大的特点,结合平衡条件即可顺利得出结论。
【难度系数】
0.7
首先判断杠杆类型,先确定支点O,对比动力臂和阻力臂的长度:动力臂l₁=10cm,阻力臂l₂=80cm,动力臂小于阻力臂,由此可判断杠杆类别;接着利用杠杆平衡条件F₁l₁=F₂l₂,代入已知的F₂、l₁、l₂数值,即可计算出动力F₁的大小;最后分析伸长自拍杆的动态场景:阻力F₂不变,动力的作用点、方向、支点都不变,因此动力臂l₁保持不变,而阻力臂会随杆伸长而增大,再结合杠杆平衡条件就能推导F₁的变化趋势。
【解析】
1. 杠杆类型判断:以O为支点,动力臂l₁=10cm,阻力臂l₂=80cm,动力臂小于阻力臂,因此自拍杆属于费力杠杆。
2. 计算动力F₁:根据杠杆平衡条件$F_1l_1=F_2l_2$,代入已知数据:
$F_1 × 10\ \mathrm{cm} = 3\ \mathrm{N} × 80\ \mathrm{cm}$,解得$F_1=\frac{3\ \mathrm{N} × 80\ \mathrm{cm}}{10\ \mathrm{cm}}=24\ \mathrm{N}$。
3. 动态变化分析:伸长自拍杆时,阻力F₂始终等于手机重力保持不变,动力F₁的作用点、方向、支点位置均不变,因此动力臂l₁大小不变,而阻力臂会随自拍杆伸长而变大,由杠杆平衡条件可得,F₁的大小将变大。
【答案】
费力 24 变大
【知识点】
杠杆分类,杠杆平衡条件
【点评】
本题结合生活中自拍杆的实际场景考查杠杆相关知识,属于基础应用型题目,易错点是动态变化的推导,只要明确阻力臂随杆伸长增大的特点,结合平衡条件即可顺利得出结论。
【难度系数】
0.7
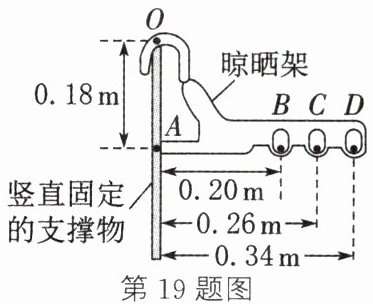
19 如图所示,质量不计的晾晒架钩在竖直固定的支撑物上,挂上衣服后,晾晒架可看成以$O$为支点的杠杆,$A$、$B$、$C$、$D$ 四点在同一水平线上。当把重为 $3.6\ \mathrm{N}$ 的衣服挂在
D
$(B/C/D)$点时,作用在 $A$ 点的阻力最大,最大值为6.8
$\mathrm{N},$阻力的方向是水平向右
。答案:19. D 6.8 水平向右
解析:
【分析】
我们可以将晾晒架抽象为以O为支点的杠杆,利用杠杆平衡条件来解题:首先明确动力是衣服的重力,阻力是A点受到的支撑物的作用力;在动力大小固定、阻力臂为定值的前提下,动力臂越大,对应的阻力就越大,对比B、C、D三点的动力臂长度,就能确定阻力最大的悬挂点;之后代入杠杆平衡公式计算最大阻力的数值,最后根据杠杆的转动趋势判断阻力的方向即可。
【解析】
1. 确定最大阻力对应的悬挂点:
将晾晒架视为支点为O的杠杆,根据杠杆平衡条件$F_1L_1=F_2L_2$,动力为衣服的重力$G=3.6\ \mathrm{N}$,动力臂是支点O到竖直向下的重力作用线的垂直距离,也就是各悬挂点到竖直支撑物的水平距离,B、C、D三点的动力臂分别为0.20m、0.26m、0.34m,D点的动力臂最大,因此挂在D点时A点的阻力最大。
2. 计算最大阻力:
阻力臂是支点O到A点阻力作用线的垂直距离,O点到A点的竖直距离为0.18m,阻力沿水平方向,因此阻力臂$L_A=0.18\ \mathrm{m}$,代入杠杆平衡公式:
$F_A=\frac{G· L_G}{L_A}=\frac{3.6\ \mathrm{N}×0.34\ \mathrm{m}}{0.18\ \mathrm{m}}=6.8\ \mathrm{N}$
3. 判断阻力方向:
重物挂在D点时,杠杆有绕O点顺时针转动的趋势,A点会向左挤压竖直支撑物,根据力的作用相互性,支撑物对A点的阻力方向为水平向右。
【答案】
D;6.8;水平向右
【知识点】
杠杆平衡条件;力臂判断
【点评】
本题结合生活中晾晒架的实际场景考查杠杆的应用,核心考点是杠杆平衡条件的灵活运用,解题的易错点是力臂的判断,需要准确区分支点到力的作用线的垂直距离,避免把线段长度直接等同于力臂,属于杠杆实际应用的典型题型。
【难度系数】
0.6
我们可以将晾晒架抽象为以O为支点的杠杆,利用杠杆平衡条件来解题:首先明确动力是衣服的重力,阻力是A点受到的支撑物的作用力;在动力大小固定、阻力臂为定值的前提下,动力臂越大,对应的阻力就越大,对比B、C、D三点的动力臂长度,就能确定阻力最大的悬挂点;之后代入杠杆平衡公式计算最大阻力的数值,最后根据杠杆的转动趋势判断阻力的方向即可。
【解析】
1. 确定最大阻力对应的悬挂点:
将晾晒架视为支点为O的杠杆,根据杠杆平衡条件$F_1L_1=F_2L_2$,动力为衣服的重力$G=3.6\ \mathrm{N}$,动力臂是支点O到竖直向下的重力作用线的垂直距离,也就是各悬挂点到竖直支撑物的水平距离,B、C、D三点的动力臂分别为0.20m、0.26m、0.34m,D点的动力臂最大,因此挂在D点时A点的阻力最大。
2. 计算最大阻力:
阻力臂是支点O到A点阻力作用线的垂直距离,O点到A点的竖直距离为0.18m,阻力沿水平方向,因此阻力臂$L_A=0.18\ \mathrm{m}$,代入杠杆平衡公式:
$F_A=\frac{G· L_G}{L_A}=\frac{3.6\ \mathrm{N}×0.34\ \mathrm{m}}{0.18\ \mathrm{m}}=6.8\ \mathrm{N}$
3. 判断阻力方向:
重物挂在D点时,杠杆有绕O点顺时针转动的趋势,A点会向左挤压竖直支撑物,根据力的作用相互性,支撑物对A点的阻力方向为水平向右。
【答案】
D;6.8;水平向右
【知识点】
杠杆平衡条件;力臂判断
【点评】
本题结合生活中晾晒架的实际场景考查杠杆的应用,核心考点是杠杆平衡条件的灵活运用,解题的易错点是力臂的判断,需要准确区分支点到力的作用线的垂直距离,避免把线段长度直接等同于力臂,属于杠杆实际应用的典型题型。
【难度系数】
0.6
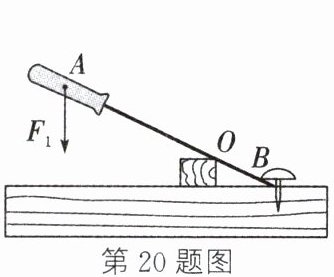
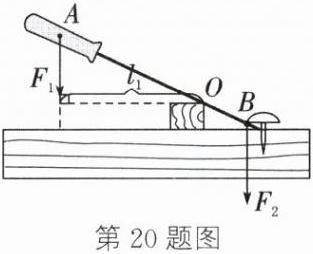
20 新趋势 教材 P3 素材改编 如图所示为用螺丝刀撬图钉的示意图,在图中画出动力$F_{1}$的力臂$l_{1}$和阻力$F_{2}$的示意图。
答案:20. 如图所示
解析:
【分析】
解题时首先明确本题的两个作图任务:绘制动力臂、绘制阻力示意图。首先确定支点,螺丝刀撬图钉时是绕着和垫块的接触点O转动,因此支点为O点。画力臂的标准步骤是:先定位支点,再将动力F₁的作用线沿方向适当延长,最后从支点向力的作用线作垂线,该垂线段就是对应的动力臂。接下来判断阻力:当在A点施加向下的F₁时,螺丝刀会绕O点顺时针转动,B端会向上抬起试图撬起图钉,图钉会给螺丝刀一个向下的反作用力阻碍杠杆转动,这个力就是阻力F₂,作用点在螺丝刀和图钉的接触位置B点。
【解析】
1. 绘制动力臂$l_1$:沿$F_1$的方向适当延长得到动力的作用线,从支点O向$F_1$的作用线作垂线段,标注直角垂直符号,在该垂线段旁标注$l_1$,即为动力$F_1$的力臂。
2. 绘制阻力$F_2$:在B点位置,沿阻碍杠杆顺时针转动的向下方向画出带箭头的线段,在箭头旁标注$F_2$,即为阻力的示意图。
【答案】
正确画出支点O到$F_1$作用线的垂线段$l_1$,以及作用在B点、方向向下标注为$F_2$的阻力示意图。
【知识点】
力臂的画法,杠杆五要素
【点评】
本题是教材改编的杠杆基础作图题,属于常规考点,常见易错点有两个:一是误将支点到A点的连线当作力臂,忽略力臂是支点到力的作用线的垂直距离的定义;二是错误将阻力方向画为向上,牢记阻力是阻碍杠杆转动的力,结合杠杆的转动趋势就可以快速判断出阻力的正确方向。
【难度系数】
0.7
解题时首先明确本题的两个作图任务:绘制动力臂、绘制阻力示意图。首先确定支点,螺丝刀撬图钉时是绕着和垫块的接触点O转动,因此支点为O点。画力臂的标准步骤是:先定位支点,再将动力F₁的作用线沿方向适当延长,最后从支点向力的作用线作垂线,该垂线段就是对应的动力臂。接下来判断阻力:当在A点施加向下的F₁时,螺丝刀会绕O点顺时针转动,B端会向上抬起试图撬起图钉,图钉会给螺丝刀一个向下的反作用力阻碍杠杆转动,这个力就是阻力F₂,作用点在螺丝刀和图钉的接触位置B点。
【解析】
1. 绘制动力臂$l_1$:沿$F_1$的方向适当延长得到动力的作用线,从支点O向$F_1$的作用线作垂线段,标注直角垂直符号,在该垂线段旁标注$l_1$,即为动力$F_1$的力臂。
2. 绘制阻力$F_2$:在B点位置,沿阻碍杠杆顺时针转动的向下方向画出带箭头的线段,在箭头旁标注$F_2$,即为阻力的示意图。
【答案】
正确画出支点O到$F_1$作用线的垂线段$l_1$,以及作用在B点、方向向下标注为$F_2$的阻力示意图。
【知识点】
力臂的画法,杠杆五要素
【点评】
本题是教材改编的杠杆基础作图题,属于常规考点,常见易错点有两个:一是误将支点到A点的连线当作力臂,忽略力臂是支点到力的作用线的垂直距离的定义;二是错误将阻力方向画为向上,牢记阻力是阻碍杠杆转动的力,结合杠杆的转动趋势就可以快速判断出阻力的正确方向。
【难度系数】
0.7
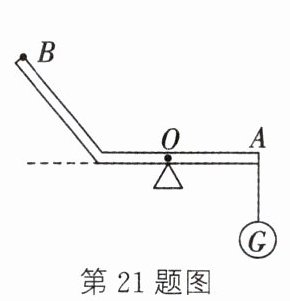
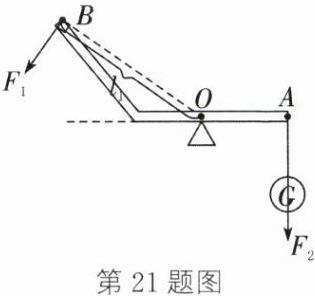
21 如图所示,在杠杆 AOB 的 A 端挂一重物G,要使杠杆在如图所示的位置平衡,请画出在杠杆上施加的最小动力$F_{1}$与力臂$l_{1}$及阻力$F_{2}$的示意图。
答案:
21. 如图所示
21. 如图所示
解析:
【分析】
要解决这道杠杆作图题,首先回忆杠杆平衡条件:$F_1l_1=F_2l_2$,当阻力和阻力臂的大小固定时,动力臂越长,对应的动力就越小。第一步先确定支点是O点,要找最长动力臂,只需要在杠杆上找到距离支点O最远的点,本题里B点是离O最远的点,连接OB就得到了最长的动力臂$l_1$。第二步判断动力的方向:A端挂的重物会让杠杆绕O点顺时针转动,因此动力需要让杠杆有逆时针转动的趋势,方向垂直于OB即可。第三步画阻力:阻力是重物对杠杆的拉力,作用点在A端,方向竖直向下,直接画出即可。
【解析】
1. 确定最长动力臂:支点为O,杠杆上B点到O的距离最大,连接OB,该线段就是最长动力臂$l_1$,标注$l_1$。
2. 画出最小动力$F_1$:过B点作垂直于OB的线段,方向斜向下(保证动力使杠杆逆时针转动,抵消重物带来的顺时针转动效果),标注箭头和$F_1$。
3. 画出阻力$F_2$:阻力是重物G对杠杆的拉力,作用点在A点,沿竖直向下方向画带箭头的线段,标注$F_2$。
【答案】
【知识点】
杠杆平衡条件,力臂作图,最小动力判断
【点评】
本题是杠杆作图的经典常考题,核心考点是最小动力的推导,不少同学容易错误选择OA作为最长力臂,或是动力方向判断错误,解题时牢记最小力的核心逻辑:支点到力的作用点的连线为最长力臂,动力方向需与阻力的转动效果相反,即可避免出错。
【难度系数】
0.4
要解决这道杠杆作图题,首先回忆杠杆平衡条件:$F_1l_1=F_2l_2$,当阻力和阻力臂的大小固定时,动力臂越长,对应的动力就越小。第一步先确定支点是O点,要找最长动力臂,只需要在杠杆上找到距离支点O最远的点,本题里B点是离O最远的点,连接OB就得到了最长的动力臂$l_1$。第二步判断动力的方向:A端挂的重物会让杠杆绕O点顺时针转动,因此动力需要让杠杆有逆时针转动的趋势,方向垂直于OB即可。第三步画阻力:阻力是重物对杠杆的拉力,作用点在A端,方向竖直向下,直接画出即可。
【解析】
1. 确定最长动力臂:支点为O,杠杆上B点到O的距离最大,连接OB,该线段就是最长动力臂$l_1$,标注$l_1$。
2. 画出最小动力$F_1$:过B点作垂直于OB的线段,方向斜向下(保证动力使杠杆逆时针转动,抵消重物带来的顺时针转动效果),标注箭头和$F_1$。
3. 画出阻力$F_2$:阻力是重物G对杠杆的拉力,作用点在A点,沿竖直向下方向画带箭头的线段,标注$F_2$。
【答案】
【知识点】
杠杆平衡条件,力臂作图,最小动力判断
【点评】
本题是杠杆作图的经典常考题,核心考点是最小动力的推导,不少同学容易错误选择OA作为最长力臂,或是动力方向判断错误,解题时牢记最小力的核心逻辑:支点到力的作用点的连线为最长力臂,动力方向需与阻力的转动效果相反,即可避免出错。
【难度系数】
0.4
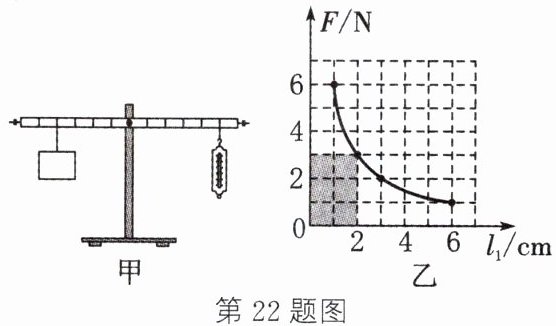
22 为了探究轻质杠杆的动力大小与动力臂的关系,小明设计了如图甲所示的装置。测量时,总保持杠杆在水平位置平衡,目的是
便于测量力臂大小
;改变动力臂,多次测量,根据记录的数据画出如图乙所示的动力随动力臂变化的图像,则杠杆左端所挂重物的重力大小是1.5
N(杠杆上每一小格长度为1 cm),小明发现图像中每次描出的点与两坐标轴围成的方形面积(如图中阴影部分)总相等,原因是阻力与阻力臂的乘积保持不变
。答案:22. 便于测量力臂大小 1.5 阻力与阻力臂的乘积保持不变
解析:
【分析】
我们可以分三步逐步推导:第一空,杠杆在水平位置平衡时,由于重物的重力和弹簧测力计的拉力都是竖直方向,此时力臂会和杠杆本身重合,不需要额外换算就能直接从杠杆刻度上读出力臂的长度,因此很容易想到该操作的目的是便于测量力臂。第二空,根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,从图乙任意取一组数据,比如F=6N时对应动力臂是1cm,算出动力和动力臂的乘积是6N·cm,再结合图甲数出重物对应的阻力臂是4cm,代入公式就能算出重物重力。第三空,图像里的方形面积是纵轴F乘以横轴l₁,也就是动力和动力臂的乘积,结合杠杆平衡条件,本实验里阻力和阻力臂都固定不变,所以这个乘积是定值,自然所有点对应的面积都相等。
【解析】
1. 实验中保持杠杆在水平位置平衡,动力、阻力均沿竖直方向,力臂与杠杆完全重合,可直接通过杠杆刻度读取力臂数值,因此目的是便于测量力臂大小。
2. 根据杠杆平衡条件 $ F_1 L_1 = F_2 L_2 $:从图乙取F₁=6N的点,对应动力臂L₁=1cm,可得$ F_1 L_1 = 6\mathrm{N} × 1\mathrm{cm} = 6\mathrm{N·cm} $;由图甲可知,重物悬挂点距离支点的阻力臂L₂=4cm,代入公式得$ G × 4\mathrm{cm} = 6\mathrm{N·cm} $,解得重物重力G=1.5N。
3. 图像中描点与两坐标轴围成的方形面积为$ S=F × l_1 $,本实验中阻力(重物重力)和阻力臂始终保持不变,根据杠杆平衡条件$ F l_1 = F_2 L_2 $,动力与动力臂的乘积为定值,因此所有点对应的方形面积总相等。
【答案】
便于测量力臂大小;1.5;阻力与阻力臂的乘积保持不变
【知识点】
杠杆平衡条件;力臂测量
【点评】
本题结合实验图像考查杠杆的相关知识点,既考查了杠杆实验的基础操作目的,又要求学生将图像的面积物理意义和杠杆平衡规律结合起来推导,难度梯度合理,能有效检验学生对杠杆平衡条件的灵活应用能力。
【难度系数】
0.6
我们可以分三步逐步推导:第一空,杠杆在水平位置平衡时,由于重物的重力和弹簧测力计的拉力都是竖直方向,此时力臂会和杠杆本身重合,不需要额外换算就能直接从杠杆刻度上读出力臂的长度,因此很容易想到该操作的目的是便于测量力臂。第二空,根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,从图乙任意取一组数据,比如F=6N时对应动力臂是1cm,算出动力和动力臂的乘积是6N·cm,再结合图甲数出重物对应的阻力臂是4cm,代入公式就能算出重物重力。第三空,图像里的方形面积是纵轴F乘以横轴l₁,也就是动力和动力臂的乘积,结合杠杆平衡条件,本实验里阻力和阻力臂都固定不变,所以这个乘积是定值,自然所有点对应的面积都相等。
【解析】
1. 实验中保持杠杆在水平位置平衡,动力、阻力均沿竖直方向,力臂与杠杆完全重合,可直接通过杠杆刻度读取力臂数值,因此目的是便于测量力臂大小。
2. 根据杠杆平衡条件 $ F_1 L_1 = F_2 L_2 $:从图乙取F₁=6N的点,对应动力臂L₁=1cm,可得$ F_1 L_1 = 6\mathrm{N} × 1\mathrm{cm} = 6\mathrm{N·cm} $;由图甲可知,重物悬挂点距离支点的阻力臂L₂=4cm,代入公式得$ G × 4\mathrm{cm} = 6\mathrm{N·cm} $,解得重物重力G=1.5N。
3. 图像中描点与两坐标轴围成的方形面积为$ S=F × l_1 $,本实验中阻力(重物重力)和阻力臂始终保持不变,根据杠杆平衡条件$ F l_1 = F_2 L_2 $,动力与动力臂的乘积为定值,因此所有点对应的方形面积总相等。
【答案】
便于测量力臂大小;1.5;阻力与阻力臂的乘积保持不变
【知识点】
杠杆平衡条件;力臂测量
【点评】
本题结合实验图像考查杠杆的相关知识点,既考查了杠杆实验的基础操作目的,又要求学生将图像的面积物理意义和杠杆平衡规律结合起来推导,难度梯度合理,能有效检验学生对杠杆平衡条件的灵活应用能力。
【难度系数】
0.6